Запишу в дневник, чтобы не забыть, да и пригодится может кому…
Да, это не полный и исчерпывающий мануал по iNAV, а пример настройки АП под конкретный тип ЛА.
Кроме того, этой записи в дневнике исполнился год. А за год в iNAV произошли существенные изменения. И только в лучшую сторону. Поэтому тут в тексте многое исправлено и дополнено. Актуально на конец февраля 2017. Версия iNAV 1.6.
В поисках кандидата легкого, не дорого комплекта АП для мелкого FPV самолета взор упал на давно приобретенную плату CC3D. Поставив ее на самолет и без труда настроив OpenPilot захотелось большего, а именно возврата домой. В результате после изучения темы всплыли две возможности:
iNAV (базируется на cleanflight)
Имея не очень успешный опыт эксплуатации прошивки Патрика на multiwii, прочитав наискось его тему на http://fpvlab.com, найдя фразу Патрика же, что его прошивке до iNAV очень далеко, у меня остался только один вариант. А почитав в основном положительные отзывы по системе навигации iNAV вообще развеялись все сомнения.
OSD (minimOSD или любое другое поддерживающее cleanflight) (от $8)
GPS приемник (от $10)
Итого, на АП, gps и osd вышло менее $32
FPV комплект, самолет, РУ, батареи и т.п. это и так понятно.
Фото подопытного ЛА:
Пилот может смотреть по сторонам. На мир с высоты смотрю глазами миньена 😃
Получил удовольствие от настройки iNAV, и использования - самолет летает, отлично управляется и летает в стабилизированных режимах, возвращается домой. В RTH имеется возможность изменять высоту возврата в полете при помощи стика РВ.
Начнем (для увеличения изображений правый клик на нем мышей и открыть в новой вкладке).
1. Прошивка iNAV в CC3D.
Ничего необычного в процессе нет.
Качаем скомпилированную прошивку под наш тип платы отсюда github.com/iNavFlight/inav/releases
А далее существует куча мануалов как на CC3D залить стороннюю прошивку. Например тут и тут . Единственное отличие, что для прошивки выбираем скачанный файл iNAV.
С выходом версии 1.2 для CC3D необходимо делать выбор между двумя прошивками CC3D и CC3D_PPM1. Разница очевидна - если используется приемник с выходом PPM (что очень рекомендуется) то качаем одноименную прошивку.
2. Базовая настройка
Настройку полетного контроллера начиная с iNAV 1.6 лучше начинать с закладки Presets. Здесь можно выбрать тип ЛА и за один клик настроить множество параметров.
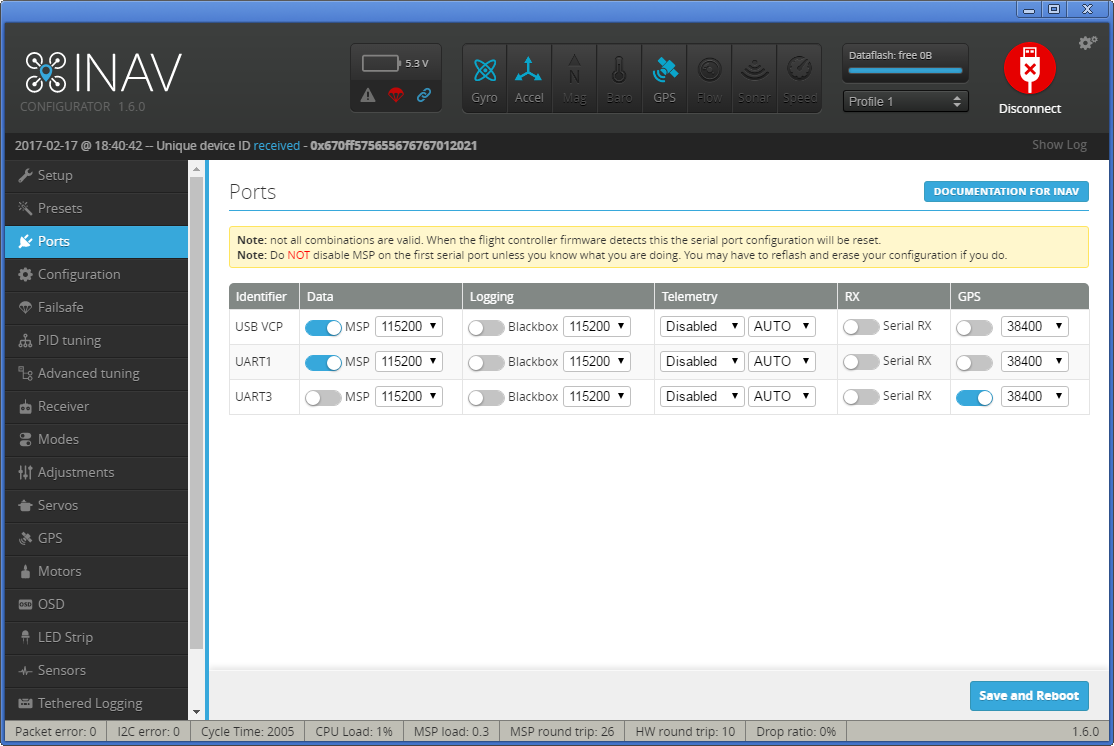
Далее будем более тонко настраивать iNAV под себя. Начнем с последовательных портов. Настройка портов выполняется на вкладке Ports. Вкладка Ports
UART1 оставляем без изменения (по-умолчанию), к нему будет подключено ОСД или FTDI для настройки с компьютера
UART3 будет занят для GPS. Соответственно и включаем эту функцию и выбираем необходимую скорость на порту.
Могу заметить, что применяя GPS приемники ublox серии 6-8 нет необходимости их подключения к компьютеру и конфигурирования при помощи u-center. iNAV все сделает сам.
Калибровка акселерометра.
Сейчас у iNAV используется шеститочечная калибровка акселерометра. Сложного в ней ничего нет. Ориентируем плату в соответствии с изображением и нажимаем одну единственную кнопку. И так шесть раз. Главное, на что следует обратить внимание так это на то, что ориентация на изображениях инструкции по калибровке - это ориентация полетного контроллера, а не летательного аппарата. Поэтому, чтоб не путаться я провожу калибровку полетника, а уже потом устанавливаю его в самолет.
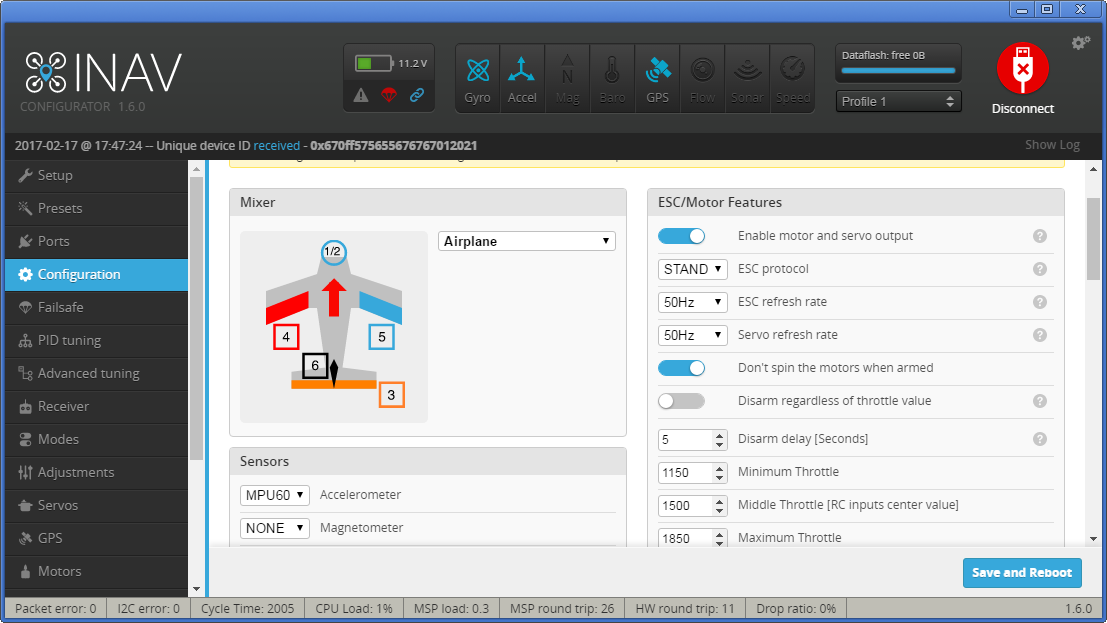
Конфигурация (закладка Configuration)
Переходим на вкладку Configuration и выбираем тип летательного аппарата - Airplane. Так как у меня классический самолет с хвостовым оперением. Для тех у кого летающее крыло, необходимо выбрать соответствующую опцию.
Не обращаем внимания на нумерацию серв/каналов на картинке. Они не очень совпадают с действительностью.
Ориентация платы.
Так как полетный контроллер можно устанавливать в самолет под любым удобным углом, то нужно настроить соответственно iNAV. Для этого переходим на закладку Configuration и в разделе Board and sensor Alignment устанавливаем желаемые углы. Например, если у вас полетный контроллер установлен так, что USB разъем “смотрит” влево по направлению полета, то устанавливаем Yaw degrees = 90. Если USB разъем получился слева, то Yaw degrees = 270. Раньше такие настройки выполнялись только из CLI. Если будете делать эти настройки там, то нужно иметь ввиду, что у iNav единицы углов равны deg*10 то есть для 90 градусов в терминале (CLI) выполняем команду
set align_board_yaw=900
для 270 градусов -
set align_board_yaw=2700
Для сохранения изменений сделанных в CLI нужно дать команду save и нажать enter.
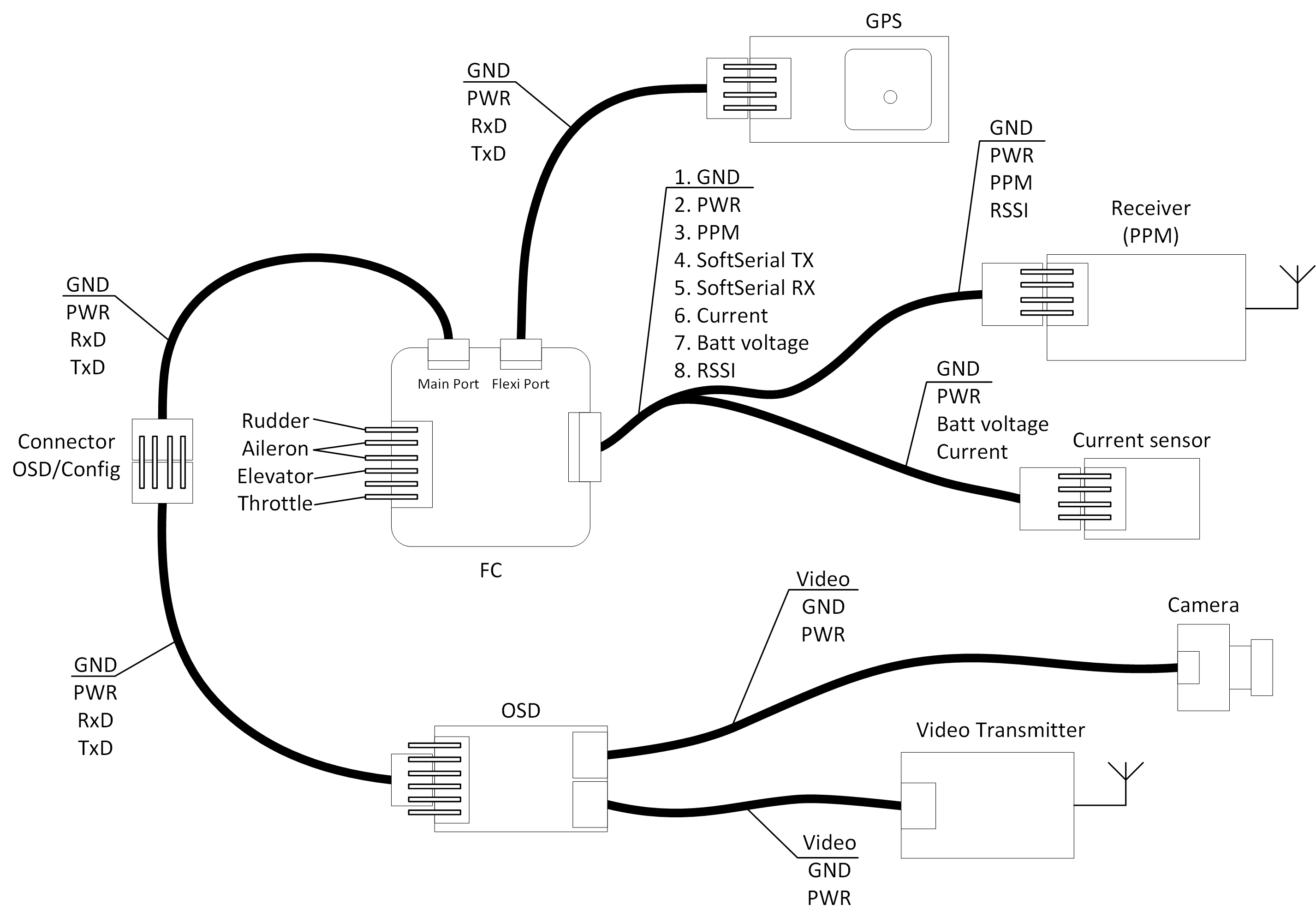
После этого, подключим все оборудование по такой схеме (это вариант с PPM Receiver). Еще раз отмечу, что вариант с PPM приемником более предпочтителен, чем следующий вариант с Parallel PWM, хотя бы потому что открываются возможности для телеметрии (SOFSERIAL) и подключение аналоговых сигналов для считывания напряжения, тока, RSSI.
Оставаясь на вкладке Configaration настраиваем следующее:
Если не хочется, чтобы самолет крутил двигателем при арминге, то включаем свитч “Don’t spin the motors when armed”.
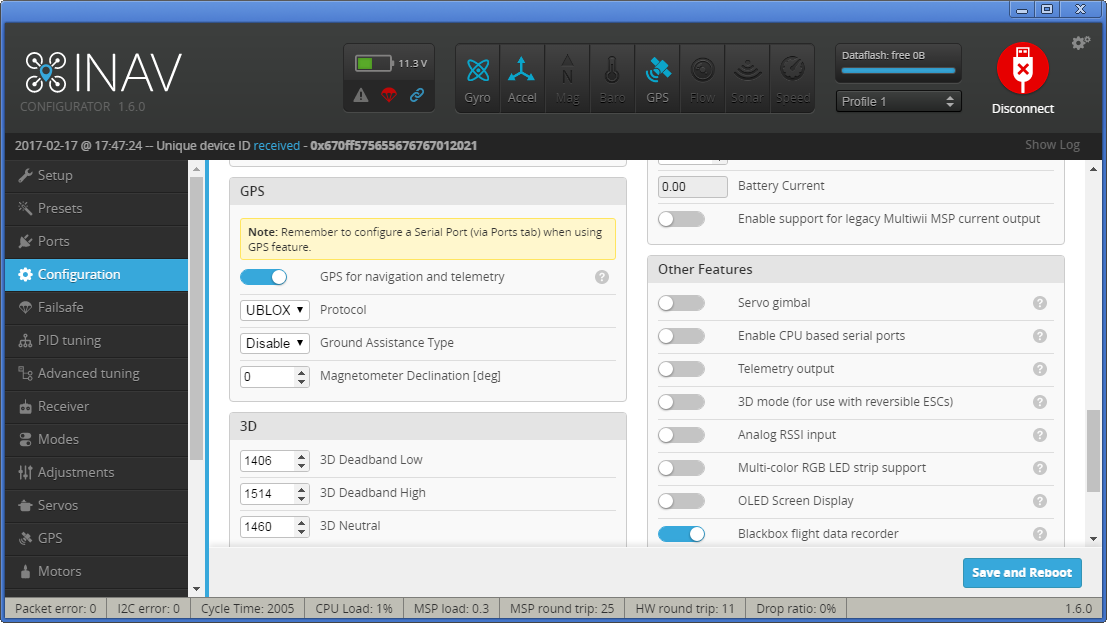
Включим и возможность работы с GPS. Выбирать протокол нет необходимости - у CC3D есть возможность общаться только по UBX.
После включения функции GPS iNav не будет армиться без GPS fix. Если хочется проверить что арм работает то можно отключить эту проверку в CLI: “set nav_extra_arming_safety = OFF”. Не забываем ее включить обратно для реальных полетов!
Так как у меня приемник PPM, то кроме всего прочего CC3D под управлением iNAV позволит мониторить напряжение батареи, ток потребляемый в полете, RSSI приемника. Все эти опции присутствуют с правой стороны конфигуратора на закладке Configuration.
В группе Other Features я включил Telemetry и SOFTSERIAL. Последняя опция позволяет использовать пины 4 и 5 входов как программный UART, когда не хватает аппаратных, в моем случае я его использую для FR-SKY телеметрии. Если уж зашла речь за нее, то нужно не забывать, что у FR-SKY UART инверсный. Но никаких аппаратных инверторов городить не нужно - разработчики iNAV позаботились. Идем в CLI и активируем инверсию на порту:
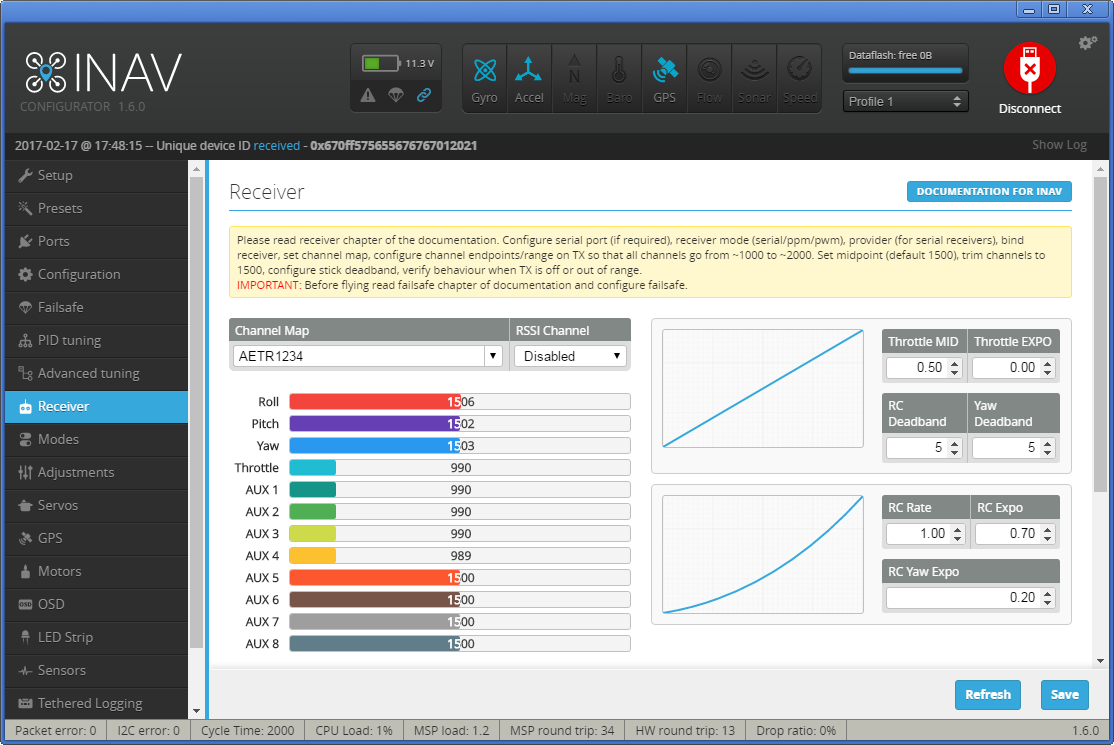
Вкладка Receiver
Здесь контролируем, что реакция каналов управления соответствует движениям стиков передатчика. Если нужно то ставим реверсы в передатчике. Но для Turnigy и Taranis этого не потребовалось. Короче, поведение должно быть таким:
Стик газа (Throttle) от себя - значение канала увеличивается
Стик руля направления (Rudder) отклонятся вправо - значение канала увеличивается
Стик руля высоты (Elevator) от себя - значение канала увеличивается
Стик элеронов (Ailerons) отклонятся вправо - значение канала увеличивается
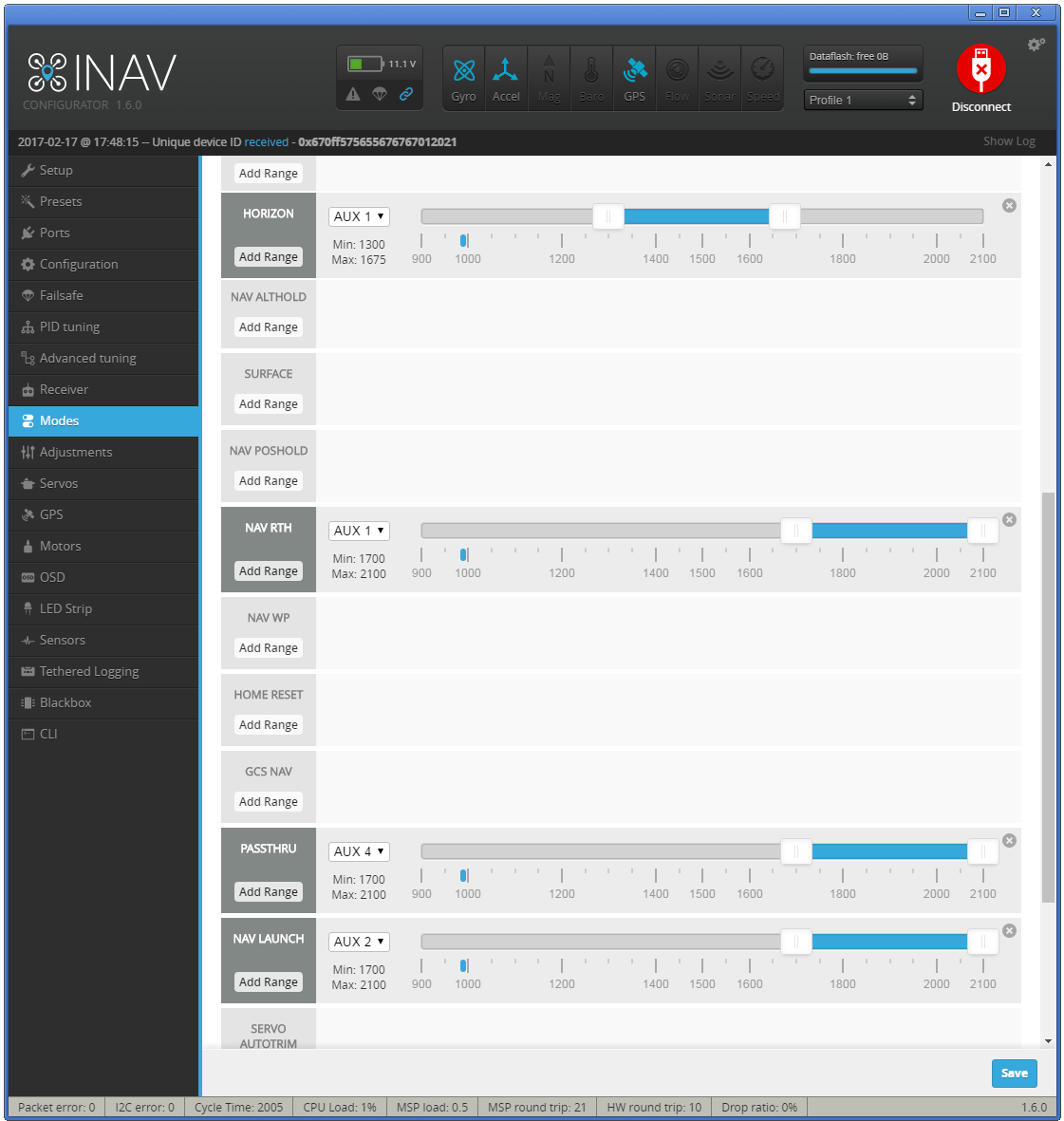
Вкладка Modes
На вкладке Modes нужно настроить соответствие режимов полета положению каналов AUX. На AUX я настроил трехпозиционный свитч. С тем как настроено у меня на картинке получается следующее:
минимальное значение канального импульса - работают одни гиры. Взлет самолета - просто песня. Взял за фюзеляж, нос градусов 10-20 вверх поднял, газу на 80-100%, самолет отпустил. Он под этим углом идет в небо. Без просадок, виляний и пр.
среднее значение - Angle. Тем, кто любит фпв пилотаж, полюбят режим Horizon 😃
максимальное значение - RTH. Летим домой. Все автоматические режимы в iNAV самодостаточные. То есть к RTH не нужно включать ANGLE или еще чего-нибудь.
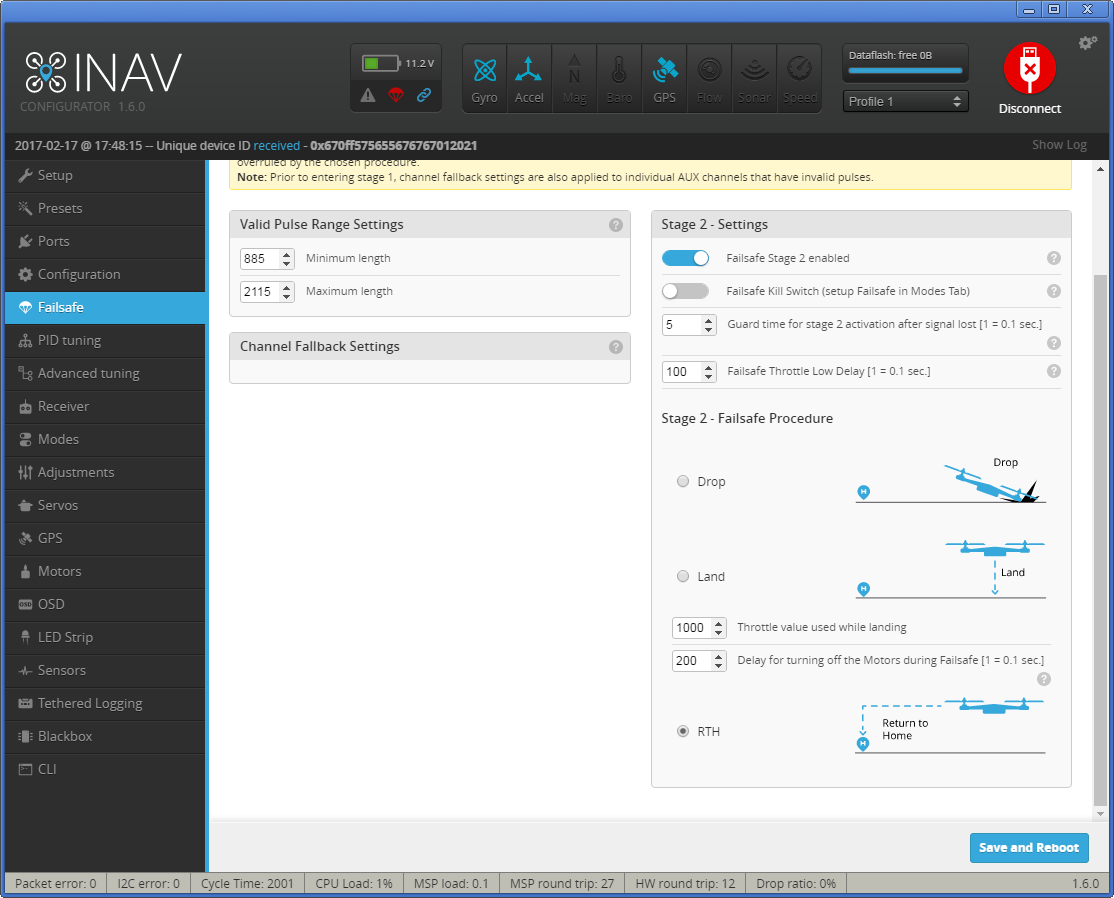
Вкладка Failsafe
Наконец-то! Начиная с версии 1.6 у iNAV появился простой и прозрачный фейлсейф.
Для работы фейлсейфа необходимо следующее:
настроить приемник так, чтобы он не выдавал никаких сигналов при выключенном передатчике
или назначить на положение одного из AUX каналов режим Failsafe и сделать так, чтобы при выключенном передатчике этот канал приводил к срабатыванию Failsafe.
Так как у меня FR-SKY D4R-II, то выбор очевиден - настраиваю так, чтоб приемник был в режиме no-pulses при фейлсейф. Для этого просто нажимаем кратко кнопку bind на приемнике при выключенном передатчике. Кроме этого, устанавливаем поведение самолета в режиме failsafe. В моем случае я выбрал возврат домой.
Кстати сказать, настройку ФС я невольно проверил. Работает. А дело было так. Одна из первых посадок получилась довольно жесткая - не удивительно, самолет размахом 65см и массой около 600г 😃. Во время этой посадки самолет повел себя так. Ударившись о землю с газом в 0, он резко ожил и дал полный газ, но врезался в кактус, который и остановил аппарат от взлета и набора высоты и кружения в RTH. Это была случайность, которая избавила меня от необходимости стоять и ждать пока сядет акк и самолет рухнет на землю. Короче, при детальном рассмотрении отпал из CC3D приемник от удара при посадке.
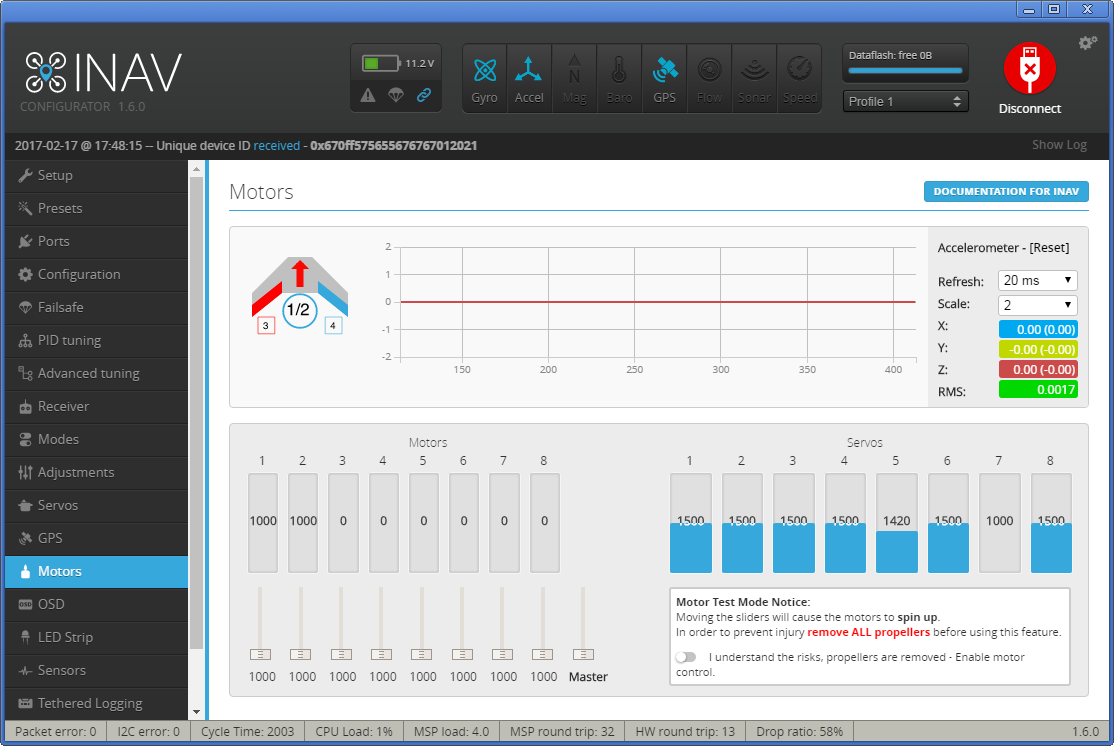
После лирического отступления идем на вкладку Motors
Вкладка Motors
На этой вкладке берем в руки самолет, качаем его по осям и смотрим, какие из ползунков шевелятся в зависимости от углов наклона по PITCH и ROLL. Можно запомнить или записать. ROLL - 4,5; PITCH - 3, YAW - 6.
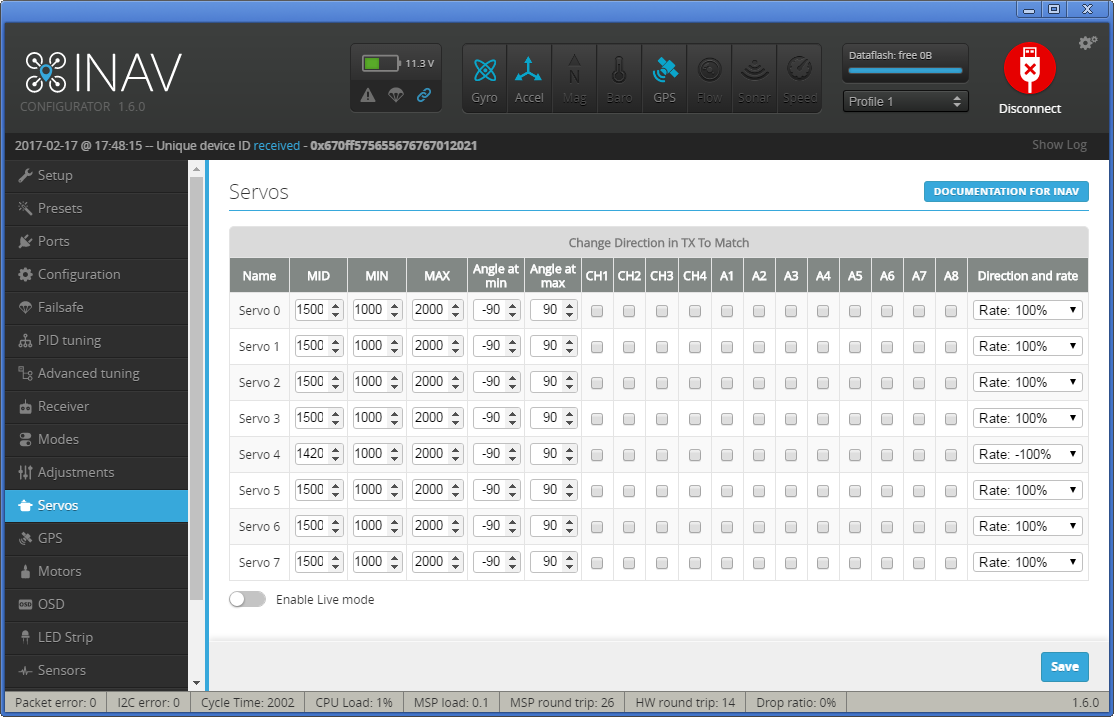
Вкладка Servos
Включаем передатчик, устанавливаем режим Angle или Horizon. Переходим на вкладку Servos.
Тут внимательно. Я, например, на неделю позже взлетел на iNAV из-за реверса элеронов, которая обнаружилась на первой секунде полета 😃. На этой вкладке настраиваем конечные и среднюю точки, расходы, а так же реверсы рулей для режимов стабилизации. Нумерация серв на этой вкладке начинается с 0! Для РВ, наклоняем хвост вниз, РВ должен должен опуститься. Если же РВ поднимается, то необходимо установить Rate (самый правый выпадающий список) Servo 2 с отрицательным знаком. Наклоняем левое крыло вниз. Левый элерон должен должен опуститься вниз, а правый подняться вверх. Если что-то не так, то исправляем установкой отрицательных Rate для Servo 3 и Servo 4 (если элероны подключены к одному каналу через Y-кабель, то достаточно поменять настройку только одного из каналов). Далее отводим хвост влево, руль направления должен отклониться влево. Если не так, то устанавливаем отрицательный Rate для Servo 5. Обратите особое внимание, что все конечные точки, нейтрали, триммеры настраиваются на той вкладке, а не в передатчике!
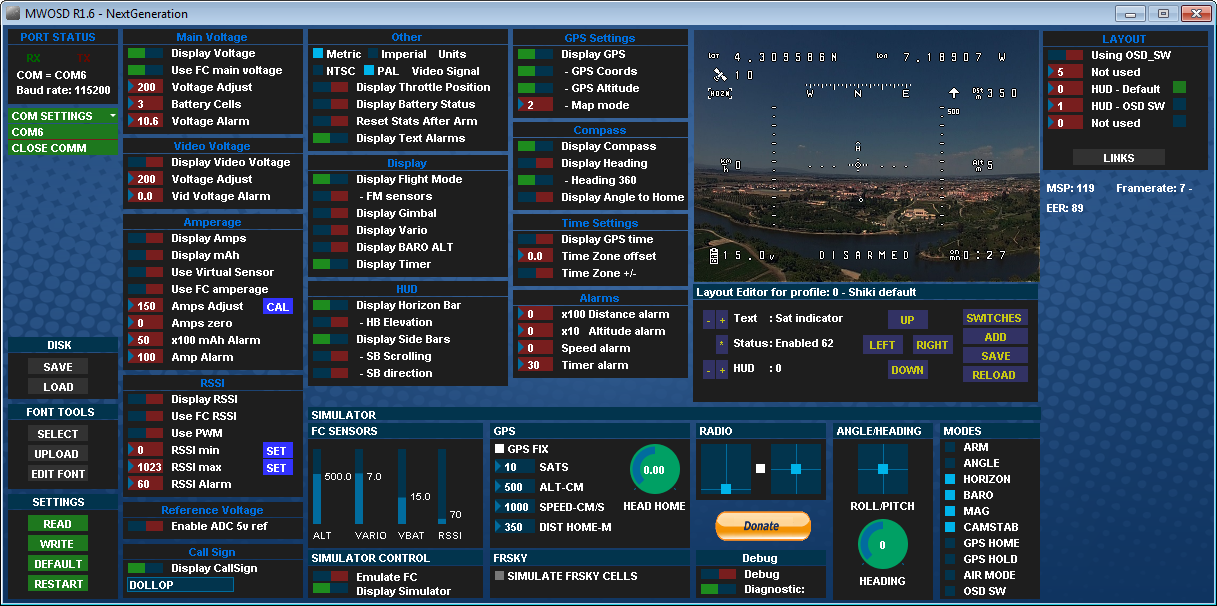
3. Переходим к OSD
Я использую minimOSD и micro minimOSD. В них нужно прошить стороннюю прошивку - MWOSD. На данный момент MWOSD претерпевает значительные изменения - добавляются протоколы, новые возможности, опять же-таки появился глючный конфигуратор под chrome…
По ссылке выше присутствует install guide. Но там все как обычно: прошивка через среду Arduino (желательно скачать самую свежую с оффсайта), запуск конфигуратора, прошивка шрифтов через конфигуратор. Настройка параметров. Скрин параметров:
Конечно, до прошивки MWOSD в плату minimOSD ее необходимо настроить. Все изменения в файле Config.h
В разделе OSD HARDWARE settings:
#define MINIMOSD
В разделе CONTROLLER SOFTWARE
#define iNAV
И наконец в разделе AIRCRAFT/INSTALLATION TYPE settings
#define FIXEDWING
В последних версиях MWOSD есть довольно полезная функция MAPMODE. Если ее активировать в Config.h, то через конфигуратор можно выбрать разные режимы карты. Смысл MAPMODE заключается в том, что центр экрана OSD представляет собой виртуальную карту с меняющимся масштабом, на которой изображен ЛА и дом. Таким образом, можно легко ориентироваться на новой местности.
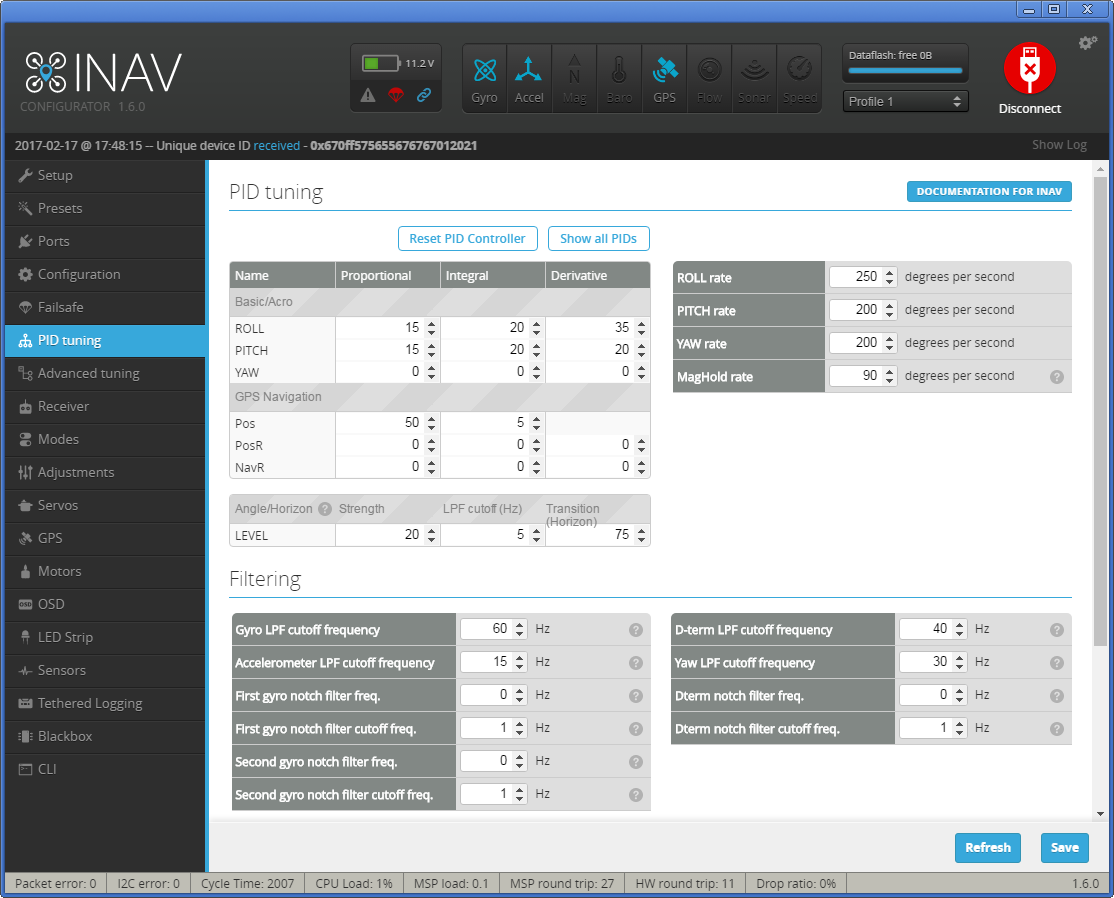
4. Настройка PIFF
Как оказалось настройки PID/PIFF которые ставит по-умолчанию Preset являются хорошим стартом для настройки. На скрине ниже приведены коэффициенты для моего 800mm крыла - EPP Rainbow. Так как Duster с миньеном, который есть на фото в начале записи пережил более 100 вылетов, а сделан он был из пенокартона, то он уже давно утилизирован
Я пользовался для настройки PIFF контроллера рекомендации автора - DigitalEntity:
0) Настраиваем самолет в режиме ANGLE. Полет выполняем визуально, в безветренный день. Начинаем со следующих значений PIFF: P=5, I=10, D/FF = 20
Даем резкую команду roll с пульта, и смотрим как самолет ее выполняет. Движение самолета должно быть плавным от начала до конца маневра, без осцилляций в начале и в конце, без раскачек. Если самолет раскачивается в конце маневра - уменьшаем FF; Если самолет начинает выполнять маневр быстро, а затем замедляется и снова продолжает движение, как бы рывками - это значит, что FF слишком мало.
Повторяем то же самое для pitch
Можно увеличивать FF так, чтобы появились осцилляции в конце маневра, а затем уменьшить этот параметр на 20%
Если самолет не достигает заданного угла - нужно увеличить коэффициент I
Чтобы самолет хорошо “боролся” с порывами ветра увеличиваем P, но помним, что увеличение P приводит к более активному использованию серв.
5. Настройка PIDов навигации
Если самолет при возврате домой или полетам по точкам летит совсем не по прямой, а восьмерками и спиралями. То стоит подумать о настройке PID навигации, так как значения по-умолчанию не всегда подходят. Первое, что нужно сделать - установить следующие параметры в CLI и в 90% случаев подобные проблемы уходят
set nav_fw_pos_xy_p = 50"
"set nav_fw_pos_xy_i = 5".
Моя не понимай. В цц3д нет барометра, как он высоту будет держать, по ЖПС?
Моя не понимай. В цц3д нет барометра, как он высоту будет держать, по ЖПС?
iNAV сделана так что в планере нужен только GPS, компас и барометр почти не нужен, вот ветка rcopen.com/forum/f123/topic443443 в ней отвечает сам разработчик iNAV.
Отлично держит высоту по GPS. На видео после 2.20 включен RTH и видно, что самолет вернулся на той же высоте, как и настроено в АП.
Фантастика!
Какая реальная погрешность удержания высоты по ЖПС в метрах?
Фантастика!
Какая реальная погрешность удержания высоты по ЖПС в метрах?
В стандартном (без бародатчика) EagleTree высота тоже по GPS определяется и самолет возвращается домой. А погрешность, да, большевата (я садился дома с минус 16 метров), но там и возврат не на 20 метрах стоит как в Назе.
Спасибо за обзор. Как раз прилажывал cc3d к Mini Skywalker и думал CleanFlight зашить но думаю стоит попробовать и iNAV.
А осд обязательна?
нет
Спасибо большое. Статейка супер. Теперь хочу разобрать свой ФПВ самолет и сделать крыло. А мысль о автовозврате пришла после вот этой ситуации
А вариант с PPM куда приемник пихать, если порты заняты? Получается на RC выходы, на какие?
А вариант с PPM куда приемник пихать, если порты заняты? Получается на RC выходы, на какие?
Добавил картинки, смотрИте
А мысль о автовозврате пришла после вот этой ситуации
стаааашно. епт.
Здравствуйте!
Прошил CC3D Atom. Сконфигурил, настроил, подключил по схеме для самолета и тут обнаружил, что сервы в выходных каналах 5 и 6 не работают. В CF-Configurator’е, во вкладке Motors соответствующие “столбики” послушно ползают вверх-вниз. В голову полезли разные мысли, но потом, как водится, на GitHub’е начал читать доки и в файле Board - CC3D.md обнаружил любопытную инфу:
The 6 pin RC_Output connector has the following pinouts when used in RX_PARALLEL_PWM mode
Pin Function Notes
1 MOTOR 1
2 MOTOR 2
3 MOTOR 3
4 MOTOR 4
5 Unused
6 Unused
В связи с чем вопрос - как же тогда на CC3D удалось реализовать схему Airplane?
Без руля направления под контролем АП!
При RX_PARALLEL_PWM закиньте серву РН на приемник на прямую.
А я был уверен, что АП использует в режиме возврата именно РН? Константин, а на Вашей CC3D тоже не работают порты 5 и 6?
Когда было подключено все в режиме RX_PARALLEL_PWM - 5 и 6 пины на CC3D не работали.
Затем я добавил себе PWM->PPM конвертер и на 5 и 6 пинах появились канальные импульсы элеронов и руля напрявления соответственно. Перешел на PPM из-за возмоности следить за напряжением и RSSI.
iNAV в режиме возврата отлично рулит элеронами и рулем высоты.
Спасибо!
У меня появлялась мысль подключить приемник по S-Bus. Буду пробовать.
Получил от Вас новую порцию вдохновения. 😃
У меня появлялась мысль подключить приемник по S-Bus. Буду пробовать.
С этим проблема. Никак нельзя совместить S.bus и навигацию 😦.
Можно, конечно, повесить GPS на программный UART, но автор не советует.
Так что картинку с serial RX из howto убрал. Остается только два варианта - PWM или PPM (предпочтительнее), S.bus можно конвертнуть в PPM😃 Или полетник более продвинутый, типа SPRacingF3. Там с количеством UARTов все в порядке
Понятно. Очень полезная информация. Спасибо, Константин!
Скажите пожалуста , подходит только ublox gps , или можно mtk использовать с nmea ? Есть лишний жпс от eagle tree , скорость порта должна быть только 38400 ?
Обычная naze32 акро достаточно ? hobbyking.com/…/__55819__AfroFlight_Naze32_Rev5_Ac…
Подойдет и любой другой, способный выдавать nmea. Автор говорит, что nmea не тестировался. Но я свои первые полеты выполнял с gps в режиме nmea. Скорость порта жпс по-вкусу. Главно, чтоб все необходимые пакеты проходили с установленной частотой обновления. naze32 акро достаточно, если приемник непеременно ППМ.
Здравствуйте коллеги!
Хотел бы использовать для стабилизации только гироскопы. Если ни один стаб. режим (Angle, Horizon)не активирован и не даешь газ, все работает как надо - реакция гир на изменение положения модели мгновенная и кратковременная. И на стики пульта тоже реакция быстрая ,со скоростью серв. Но как только добавляешь немного газку, все управляющие поверхности начинают отклоняться медленно и сохранять свою позицию. Ну как при использовании акселей для стабилизации уровня. Скорость реакции на стики пульта тоже снижается и если их просто “бросить”, то возврата плоскостей в исходное состояние не происходит. Модель быстрая и такой реакции на управление катастрофически не хватает. Только экстренное переключение в PASSTHRU не позволило её прикопать.😃
Дык вопрос к знатокам - это баг или фича? Или я что-то намудрил?😃
Софт - iNav 1.0.1, железо - CC3D Atom.
проверяйте настройки.
на 1.0.0 на одних гирах прекрасно летает, если ни один режим стабилизации не активирован. Но приду домой скорость реакции с газом и без сравню
Все настройки проверял и менял не по одному разу. Но только в GUI. В CLI не лазал,
т.к. у Вас и по дефолту хорошо летает.😃
Версия софта у меня тока чуток выше, 1.0.1.
Проверил - похоже, что фича или глюк. Действительно, при даче газа поведение серв, когда ни один режим стабилизации не активирован изменяется. Оно отличается от Horizon, но на одни гиры не похоже. Однако, мой самолет ведет себя в воздухе хорошо и держит угол, в который я его стиками поставил 😵.
Вот этот малышок, с полётным весом 85 грамм, получился очень резким и быстрым. drive.google.com/open?id=0BxmU2SNrXk18YWZDcjNtdDd3…
Хочется его немного урезонить стабилизацией. 😃 Но скорости отклика на стики пульта не хватило для комфортного пилотирования. К сожалению все мои другие системы стабилизации больше и тяжелее Атома. Не для такой мелкоты.😉
Крайне полезная статья. Отличий у iNav по сравнению CleanFlight’ом немало. Сам пишу статью о том, как собирал и настраивал квадрокоптер. Если автор непротив, позаимствую какие-то части статьи отсюда и изменениями под квадрокоптер.
Не против 😉
Подскажите, может глупый вопрос, но как у вас получается прошить iNAV в СС3D если по инструкциям в начале статьи прошивка через Openpilot прошивок Cleanflight/Betaflight в CC3D с расширением .bin, а прошивка iNAW идет с расширением .hex ? У меня контроллер CC3D Атом.
Разобрался, помогло вот это видео, на атоме, правда, не сразу нашел пятаки boot
респект и уважуха… собираюсь на вжик по вашей методе залить инаф… файлсейф очень хочется на 250 коптер:)
МУУУЖИИИИК, почти по инструкции собрал коптер… не могу победить реверс тангажа и рысканья(:
нид хелп тут:
Тут же вроде нигде тема коптера не упоминается. Очень рекомендую не создавать новых тем, а обращаться сразу к первоисточнику. rcopen.com/forum/f123/topic443443/281 Там автор, да и коптероводы часто читают, пишут, наставляют на путь истинный.
уже, тем не менее спасибо за мунал 😃 очень помог 😃
Построил таки ФПВ носитель под iNAV. Контроллер взял Flip32, GPS с банггуда но нейм. настроил каналы, и правильность работы серв, стабилизация работает правильно, управление тоже. OSD все показывает. Подошел к тестированию, но обнаружилась задержка управления. Приемник FrSky d4r-II, подключен по PPM. Может есть у кого идеи, что может быть, и кто виноват: мозг или приемник?
То есть заармить уже получилось 😃 ?
Задержка по управлению видна в полете или на столе? Носитель сильно скоростной?
Приемник не виноват 100%.
Да заармить получилось:)
Задержка дикая по управлению, как на столе, так и в воздухе. Такое чувство, что задержка возникает в мозге, и так же с задержкой работает и стабилизация, самолет как будто без неё летает.
Аппарат не быстрый 1.3м размахом, два мотора на передней кромке крыла. Тоже слабо верится в проблемы приемника, но на всякий случай попробую Спектрумовский тоже с PPM. Так же заново прошить и настроить контроллер…
У меня отрабатывает стабилизация/уравление с задержкой если я при подключении акка дергаю аппаратом, но стоит оставить тушку в покое на 5-7 секунд и все нормализируется.
Еще пара вопросов:
Аксели калибровали?
В GUI что с ползунками управления и серво?
При подключении акка стараюсь держать спокойно, привык от квадриков).
Проводил полную калибровку акселя, в GUi стоит стабильно, не плывет.
По реакции стабилизации не нравятся слишком маленькие отклонения, шевелю хвостом вверх/вниз градусов на 35 быстро, а реакция РВ примерно по 5-7град. в обе стороны. при это реакция на управление нормальная 25град. примерно, на макс. отлонение стика.
Вот сейчас совсем непонятно.
Беспокоит все же задержка или малые отклонения рулей? Или и то и другое? Увеличение P по желемой оси приведет к увеличению отклонения рулей. Однако, без полетных испытаний я бы просто так его крутить не стал. Как по мне так недорегулирование лучше перерегулирования 😉
Беспокоила и задержка и малая реакция стабилизации.
Сейчас после полного стирания и заливки/настройки прошивки заново, ситуация улучшилась. Задержка есть, но думаю в приемлемых пределах, нужно проверять в полете.
Насчет повышения Р, попробую чуток поднять, завтра испытаю в небе…
Вот что по задержке сейчас, снизу - управление напрямую с приемника, сверху - через ПК с iNAV.
Я бы не сказал, что это задержка. Это нормальная работа. Если планируется фпв близко-низко между кустов, то лучше не нужно никакого АП на носитель устанавливать. Летается все руками. А для высоты более 50м и 0,5с задержка, которую можно не заметить.
Сейчас залил 1.1RC2 завтра проверю в полете. До этого на какой-то очень старенькой летал.
И, да по расходам. Не советую ничего крутить в ПИД пока не будет самолета в воздухе в режиме стабилизации. Вот если при полете будет заметно, что самолет вялый или наоборот резко реагирует на стики с перерегулированием, то можно крутить. А то что рули перекладывает в стабе не на полный ход, то так и должно быть (остается место для команд пилота). Я себе слабо представляю ситуацию, когда АП должен вывернуть на полную стаб или элероны. Этож летчика и стошнить может.
Фпв близко и низко - это как раз самолет. что ниже на видео, летает как сказка, и полностью меня устраивает, никакой стабилизации, лишь уши на 10град.
Самолет с iNAV собираю другу, ну и попутно тестирую, себе тоже собираю носитель под inav, размахом 66см.
По расходам, в том то и дело, что самолет был вялый, стабилизация почти не чувствовалась, но ведь это было до стирания/прошивки, сейчас и задержка в норме, и возможно стабилизация покажет результат.
Ну что же, испытания показали, что стабилизация работает хорошо. и задержек считай нет. Но всегда есть “но”) Получается еще не допилен режим возврата после потери связи, точнее при появлении связи контроль над аппаратом не возвращается. Попробовал выключить пульт в полете, затем включил его, а связь так и не появилась. Самолет через секунд 5 включил возврат (настроено на 3сек.) вернулся с погрешностью 50 метров, начал заходить на круг, и дизармился в полете! это был шок. Благо стабилизация в дизарме работает, аппарат начал снижение по спирали, естественно без движков, и в конце на скорости сел, благо градусов 20 было при касании, ничего не пострадало. В общем пока буду летать в пределах дальности видео и управления, тестировать, может потом ребята допилят прошивку…
После очередного тестирования, опять появилась задержка управления, Короче проект я пока бросаю, это не серьезно, каждое новое включение с новыми приколами…
А какой вес собранного самолета?
Моего? 748гр. с батареей 1600 3s и Мобиусом.
Костиного - топикстартера.
Ваш - красваец, У меня похожий весит 1200г с 5000кой батареей 😃
Мой весит 490 без батареи. Взлетный 600-630 граммов. Это ж кирпич, сделанный из пенокартона по всем правилам от testflite 😃 собранный весь на термоклее. На 1500мач летает до 15 минут.
Но устал он уже. Более 70 вылетов, а вернее посадок в песок дают о себе знать.
Т
Моего? 748гр. с батареей 1600 3s и Мобиусом.
Аааа, двухмоторничек. Моя любимая тема. Но пока все парное занято в проекте типа vtol. Как донастрою тоже в дневник кину. Интересно, можно ли в iNav vtol настроить.
Мой весит 490 без батареи. Взлетный 600-630 граммов. Это ж кирпич, сделанный из пенокартона по всем правилам от testflite 😃 собранный весь на термоклее. На 1500мач летает до 15 минут.
Но устал он уже. Более 70 вылетов, а вернее посадок в песок дают о себе знать.
Ясно. Еще вопрос - на гитхабе пишут, что надо 256к флеша, а у СС3D только 128. Как это решается? Прошивка под 128 запилена?
под cc3d как и для остальных полетников автор собирает прошивки отдельно.
Плата выше по ссылке подойдет. Если под самолет. А так, конечно, предпочтительно с заделом на будущее F3 с баро и компасом.
Подскажите, как с клинфлая обновить бутлоадер на сс3д?
Вопрос не ясен. Понятно, что есть плата cc3d, есть cleanflight. Чего конкретно нужно добиться?
при попытке прошивки инав, вот токое пишет
Шьете через юсб или ftdi? Новые версии openpilot не позволяют шить в cc3d сторонние hexы. Поэтому шить iNav на cc3d в первый раз нужно через ftdi используя cleanflight. Не забываем перемычку между SBL и +3,3V. Вот видео про процесс
Здравствуйте.Суть проблемы такая.После долгих мучений с самолетной версией Мультивия от Патрика решил попробовать прошивку обсуждаемую здесь.Приобрел ПК NAZE32 5 ревизии,загрузил соответственну прошивку версии 1.1,настроил все согласно рекоммендациям Константина…Вроде все работает,но есть небольшое но…Почему то не включается режим стабилизации,т.е как не настраивай все время работает только “режим только гироскопа”.Это видно и по сервам и в клинфлайте.К примеру если в Мультивие в режиме стабилизации “горизонт” наклонить ПК ,то сервоприводы будут компенсировать этот наклон.Здесь такого не пооисходит,лишь кратковременная коррекция и возврат в исходное положение.
Может я что то не так настроил?
в конфигураторе значек акселерометра светится?
калибровку акселя делали?
Спасибо за отзыв)) Да,все процедуры проводил,значок акселерометра тоже светится.Если загрузить “оригинальную” прошивку которую предлагает клинфлайт конфигуратор,то все работает можно сказать из коробки…А возможно такое,что нужен какой то спец конфигуратор? Я пользуюсь клинфлайт который как приложение к гугл хром.
Здравствуйте.Почему то не калибруется акселерометр.Даешь команду откалибровать,в строке лог пишет - Accelerometer calibration started Accelerometer calibration finished но при этом значения углов не меняет,даже если калибровать плату под углом.В оригинальной прошивке из клинфлайта все проходит нормально…
Вообщем не калибруется только с INAV прошивкой,соответственно не работают режимы стабилизации. С “оригинальной прошивкой” все ок,калибруется даже через МультиВийный ГУИ. Пробовал даже менять МПУ6050 на другую,результат тот же.Прошивки INAV пробовал все версии.
Костя, привет. Собрал твой вариант, буду ставить на летающее крылышко. Хочу добавить осд, поэтому вопрос - какой вариант прошивки осд подходит под INAV?
Привет! Заливай в minimOSD прошивку MWOSD. Рекомендую ее и для других применений.
Забрал свой переходник фтди, попытался прошить сс3д. не шьется, чего то бутлоадер не нравится. вот что получается
Появилась исправленная прошивка INAV, исправили глюк по яву.
Для самолетов её похоже вообще не оптимизируют, пытался сегодня настроить пришедший недавно F3 контроллер, но ничего не вышло. Залил последнюю INAV ввел базовые настройки, подключил к самолету, и как итог - непонятные дергания серв по всем каналам после арминга. после простой перезагрузки глюки могут меняться, бывает в режиме стабилизации сервы по каналам элеронов и РВ двигаются всего на пару градусов и с дикой задержкой, при этом канал руддера адекватно реагирует.
А в гуи дерганье тоже есть?
Для самолетов её похоже вообще не оптимизируют, пытался сегодня настроить пришедший недавно F3 контроллер, но ничего не вышло. Залил последнюю INAV ввел базовые настройки, подключил к самолету, и как итог - непонятные дергания серв по всем каналам после арминга. после простой перезагрузки глюки могут меняться, бывает в режиме стабилизации сервы по каналам элеронов и РВ двигаются всего на пару градусов и с дикой задержкой, при этом канал руддера адекватно реагирует.
Аналогично,такие же симптомы как ни настраивай.Заметил только одну закономерность,если газ в ноль,то сервоприводы исправно возвращаются в среднее положение и перестают реагировать на команды с пульта))) При газ не в ноль,с пульта реагируют,но как то по своему и не всегда одинаково)))
А в гуи дерганье тоже есть?
Да, в гуи тоже дергается
Народ,помогите.Никак не побороть FS с возвратом домой.Настраиваю на аппе (АТ9) газ при потере сигнала 15%,в INav настраиваю включение бипера и второй стадией возврат домой с посадкой.При проверке-выключаю аппу моторы тухнут ,а бипер не включается,соответственно никакого возврата.
Когда на аппе отключаю FS то при потере сигнала ничего не происходит,моторы как крутились так и крутятся,бипер не включается RTH естессно тоже.
Такое впечатление что мозг(SpRF3) не может определить первую фазу FS.
Выручите или Ткните веткой.Спасибо.
P.S. Настраиваю через ИнавКонфигуратор , проша INav 1.1,подключено по SBus.
С АРМ намучился, попробую этот проект. Сегодня видел как летает квадр на этом автопилоте. Зачет 100 %. Спасибо за поддержку.
После прошивки cc3d под Cleanflight-usb не мог перепрошить ни как ни на что!
Через ftdi удалось только при !отдельной подаче питания! на плату с замкнутым бут.
!!! по ftdi не подавать!!! … а так то три дня мучал и читал )))
Всем добрый день, подскажите новичку, прошил CC3D Atom - не работает ни один AUX, остальные каналы работают адекватно, сигнал с 3-х позиц. тумблера приемыша есть (приемыш - хобикинг 6-и канальный), в опенпилоте и вие работает нормально, на любом другом канале тоже показания адекватные. Я что то не то делаю или плата убитая???
Взял контроллер SPRF3. Прошивка на нем 1.11. Стоит ли обязательно попробовать прошить на 1.13. Не до конца понял как обновить прошивку. Через USB можно или только через UART1 и FTDI. И пины BOOT надо закорачивать при обновлении прошивки и в какой момент и когда. Извините, читал читал и не понял. Спасибо.
Разобрался как перепрошить на 1.13. Еще раз посмотрел видео выше, стало понятно. Спасибо Константину за поддержку.
Теперь перепрошил на 1.1 iNav. Пока ничего сложного. Спасибо за поддержку.
Здравствуйте помогите понять в чем проблема, в любом из режимов при подачи газа уползают все остальные каналы. Контролер NAZE 32 Rev.6
Люди, уже и автор и я писАл, что не нужно на земле/в_руках тестировать режимы. Вы ровным счетом ничего не увидите. Если очень хочется или убираем I-компонент ПИД контроллера или ставьте ЛА(FC) в 100% горизонт. Еще раз: из-за I-составляющей будут плыть все каналы. Котроллер хочет отработать, чтоб исправить ошибку, а вы ему этого сделать не позволяете, растет интегральная состявляющая, ползут сервы/каналы, чтоб выровнять-таки ЛА.
Да, на днях собираюсь обновить запись. Давно и успешно летаю на крыле wing-wing z84. коэфф ПИД стабилизации по-умолчанию меня устроили, а вот при настройке навигации потребовалось изменение коэффициентов ПИД (была самая распространенная проблема - полет восьмеркой вокруг базы и переруливание при развороте домой).
Люди, уже и автор и я писАл, что не нужно на земле/в_руках тестировать режимы. Вы ровным счетом ничего не увидите. Если очень хочется или убираем I-компонент ПИД контроллера или ставьте ЛА(FC) в 100% горизонт. Еще раз: из-за I-составляющей будут плыть все каналы. Котроллер хочет отработать, чтоб исправить ошибку, а вы ему этого сделать не позволяете, растет интегральная состявляющая, ползут сервы/каналы, чтоб выровнять-таки ЛА.
Большое спасибо, видимо моя не внимательность. В этой теме вроде все прочитал, а вот авторскую не полностью уж слишком много там разной информации время да и терпения не хватит чтобы все прочитать. Это мой первый подобный проект и контролер, вопросов просто ТЬМА но вроде в большинстве разбираюсь пока. Извините за глупые вопросы и сече раз спасибо.
А на квадрике с CC3D если перешить на inav будет ли возврат домой работать? Gps 7 версии от назе32.
Нет. На квадр нужен компас
Константин, Вы пишите:
"С тем как настроено у меня на картинке получается следующее:
минимальное значение канального импульса - работают одни гиры. Взлет самолета - просто песня. Взял за фюзеляж, нос градусов 10-20 вверх поднял, газу на 80-100%, самолет отпустил. Он под этим углом идет в небо. Без просадок, виляний и пр.
среднее значение - Angle. Тем, кто любит фпв пилотаж, полюбят режим Horizon
максимальное значение - RTH+Angle. Летим домой со стабилизацией."
А как получить полностью ручное управление, без гир?
Вроде как есть режим PASSTHRU.
Спасибо, то что надо!
Еще вопрос. У Вас ARM не настроено, как вы армите мотор?
Я уже второй день бьюсь, не могу завести мотор. Куда копать?
Если ARM не настроен, то iNAV армится по-коптерному - стик YAW до упора вправо при газе в минимуме.
Если включен GPS, то без 3д фикса и необходимого количества спутников арма не будет. Чтобы это обойти нужно через CLI установить set nav_extra_arming_safety = OFF
Спасибо, сегодня полетел на маленьком крыле!!! Очень понравилась стабилизация!
Но я зажал расходы во вкладке Servos до 50% и в стабилизации управление очень вялое, а в ручном резкое. Ручной режим меня устраивает а вот в стабилизации хотелось бы больших углов отклонения элевонов. Возможно как то это сделать?
И при возврате домой ощущение что либо газ ограничивается до половины либо скорость установлена слишком маленькая. Какой параметр за это отвечает? И какой параметр отвечает за высоту возврата в NAV RTH?
C первым вопросом похоже разобрался: In “Angle” Mode you don’t need high steering surface deflection. Set “p_roll” and “p_pitch” just as high that you have 25% of full travel.
И с последним вопросом похоже тоже разобрался: nav_rth_altitude.
Да все верно. В стабилизации всегда кажется, что самолет “туповат”, на то она и стабилизация 😃. Еще, что не очень нравится, так это что при нулевом газе происходит сброс ошибок ПИД регулятора и он не работает вообще, а управление в режимах стабилизации напрямую не пропускается. То есть имеем на посадке летящий вниз неуправляемый кирпич. Так что посадка, если хочется точная и мягкая только в ручном режиме. Так как в моем любимом АП от msv самолет садится в стабилизции просто заглядение (или вообще в автопосадке), и я к этому очень привых, то считаю, что у iNAV это единственная существенная недоработка. Может автор поправит в следующих релизах.
Вчера мне не показалось что самолет при выключенном движке не управляется, несколько раз садился и подруливал с выключенным движком в режиме стабилизации, прошивка у меня последняя.
Вот еще из Wiki по самолетной части: Use Airmode mode to get full stabilitation and servo throw with no throttle applied.
По скорости возврата подскажите плиз.
> при возврате домой ощущение что либо газ ограничивается до половины либо скорость установлена слишком маленькая. Какой параметр за это отвечает?
Вчера мне не показалось что самолет при выключенном движке не управляется, несколько раз садился и подруливал с выключенным движком в режиме стабилизации, прошивка у меня последняя.
ОК. возможно. Последнюю не прошивал.
при GPS режимах за газ отвечают параметры:
nav_fw_cruise_thr - газ круиза (канальный импульс в мс) - по умолчанию 1400
nav_fw_min_thr - минимальный газ в gps режимах (канальный импульс в мс) - по умолчанию 1200
nav_fw_max_thr - максимальный газ в gps режимах (канальный импульс в мс) - по умолчанию 1700
nav_fw_pitch2thr - сколько газу добавлять/отнимать при изменении pitch в gps режимах (%) - по умолчанию 10
скажите пожалуста , можно ли не заводить напряжение батареи и рсси на полетный контроллер , а подать эти данные на micro minim osd ? будет работать ?
подключил gps от eagle tree , который прекрасно работает на 10hz , но сс3d его не видит вообще . питание подавал дополнительно , диод на gps гас когда получал фикс .
в настройках клинфлайт выставлено всё как у автора, и подключено как на схеме . NMEA … видимо таки только ублоксы подходят , совсем уже mtk не годятся в моделизме((
Приветствую!
Напряжение и рсси можно без проблем завести на осд. При этом в настройках осд нужно отключить две опции - Use FC main voltage и Use FC RSSI.
поддержка NMEA на CC3D в новых версиях отключена - не хватает места на все. Поэтому:
либо CC3D и ublox
либо mtk и любой F3 контроллер
либо более старая (0.9 кажется) версия iNAV, там еще поддержу NMEA не оторвали
или перекомпилировать необходимую версию под себя, убрав что-то другое, но оставив nmea.
" или перекомпилировать необходимую версию под себя, убрав что-то другое, но оставив nmea."
Спасибо большое, к сожалению компилировать не умею (( , Закажу маленький unlox, они уже недорогие. MTKашки вчерашний день)
подключил gps от eagle tree , который прекрасно работает на 10hz , но сс3d его не видит вообще . питание подавал дополнительно , диод на gps гас когда получал фикс .
в настройках клинфлайт выставлено всё как у автора, и подключено как на схеме . NMEA … видимо таки только ублоксы подходят , совсем уже mtk не годятся в моделизме((
На МСВ автопилот - подходит.
Завел на аукс1 режим angle , но он работает постоянно , независимо ни от чего . как отключить стабилизацию вообще ?
На определенное положение канала AUX1 нужно настроить режим PASSTHRU
Добрый день! пробую подрубить свой приемыш futaba r6208sb по sbus, вроде как все по инструкции с гитхаба сделал, а на вкладке ресивер пусто 😦. (прошивка 1.3 inav_opbl, приемыш тыкал в MainPort). Подскажите в чем беда?
платка у меня cc3d atom.
с sbus разобрался. не будет работать на это прошивке с OPBL
спасибо за обзор.
в конфигураторе inav активировал мониторинг v bat , по мануалу измерять напряжение от батареи можно через делитель из резисторов , выход из которого подается на 7 пин rc разьема .
Но у меня непонятно почему , уже показывается напряжение в конфигураторе , без подключения батареи к делителю , плата cc3d запитывается от бека 5в.
Скажите , это нормальное поведение ? какой вольтаж оно будет мерять после подключения вольтаж сенсора.
то что сейчас отображается напряжение после бека , это точно не верно , так как оно стабилизированое ((
Если делитель не подключать, то получается следующее. На этом пине скорее всего включен подтягивающий резистор у микроконтроллера. Поэтому и отображается что-то там намерянное. На это можно не обращать внимание. Как только подключите делитель (но не будет на входе напряжения), будет показывать около 0.
Делитель нужен такой (правая схема) img.rcgroups.com/http://i.imgur.com/inD5NdN.png?h=…
Контакт power_adc подключаем к 7-му пину rc разъема. Vbat, понятно, к батарее. Возможно в конфигураторе нужно будет немного подкрутить vbat_scale
Да, на днях собираюсь обновить запись. Давно и успешно летаю на крыле wing-wing z84. коэфф ПИД стабилизации по-умолчанию меня устроили, а вот при настройке навигации потребовалось изменение коэффициентов ПИД (была самая распространенная проблема - полет восьмеркой вокруг базы и переруливание при развороте домой).
А какие ПИДы подстраивали, чтобы аппарат не восьмерил вокруг дома? И что Вы называете переруливанием при возврате?
Мой аппарат после включения RTH плавно разворачивается и летит к дому не по прямой, а огромными восьмерками. Менял версии прошивки, крутил пиды- характер поведения сохраняется.
Переруливанием я обозвал процесс когда вместо четкого разворота на дом (при значительном удалении, естественно) самолет делает больший разворот, чем следовало. Например нужно было развернуться на 180 градусов, а развернулся на 270. Бывает, что и восьмерками летит, как в вашем случае.
Для самолета нужно сделать в cli команду set nav_navr_p = 50. И сразу полет домой станет по прямолинейной траектории
Ой, забыл, что имена переменных поменялись…
Сделайте
“set nav_fw_pos_xy_p = 50”
“set nav_fw_pos_xy_i = 5”
Спасибо, Константин, я уже увидел, что имена многих параметров в новых релизах поменялись.
И уже поправил в своих настройках. Буду пробовать.
Вы с такой уверенностью говорите что делать, что я просто не сомневаюсь в успехе! 😁
Спасибо за очень интересную запись! Тоже являюсь “счастливым обладателем” CC3D. Подскажите марку GPS-модуля на картинке с “реальным железом” (что-то мне не попадались GPS-модули с разведенным I2C).
О, вопрос интересный. Это один из первых модулей ublox 6, появившихся в продаже. Ему уже лет 5 точно. Когда я его покупал, то почему-то думал, что он мне будет и данные отдавать по i2c. И я смогу подключить его напрямую к multiwii. Но это была ошибка. После прочтения мануала выяснилось, что к этому i2c можно подключить только любую флеш-память для сохранения настроек. Что и было сделано.
Сейчас обновлю дневник, чтоб были актуальные скриншоты и информация для iNAV 1.6. Если не получится, то придется делать новую запись
😍Здравствуйте.
Прочел и меня заинтересовало. Хочется собрать мелколёт на сс3D.
И вот первая задержка.
В open pilot прошил 1.3 СС3D_OPBl.bin и всё
В INAV 1.6 не прошить 1.6 СС3D_PPM1.hex. Как не изгаляйся ни чего не вышло. С Naze32 всё как по маслу. СС3D два контроллера и везде bootloader not resposing. Может у кого есть подсказка.- Куда копать?
Заранее благодарен.
СС3D надо шить через FDTI адаптер, и все прошьется 😃 (только уже не OPBL версию прошивки)
Спасибо Константин и Михаил. Пробовал через FDTI адаптер на I NAV и Cleanflight и с OPBL версией прошивки и прошивал обратно на Open pilot, и снова через FDTI адаптер. Bootloader не отвечает. Х–нь какая та.
Но буду терзать.
перемычку запаявали?
Перемычку SBL и 3,3 замыкал только на момент включения контроллера по усб, загорался один зеленый светодиод . Далее подключал ФДТИ на main port. COM port определялся. Выбирал CC3D ppm, далее выбирал прошивку 1,6. Button FLASH … и Bootloader not resposing
И Так каждый раз. Причём тренировался на двух рабочих контроллерах CC3D. А вот NAZE 32 всё пошло сразу как по маслу.
надо запаять, прошить через фтди, потом распаять
чем шьете?
Выше в теме есть видео, по которому прекрасно шьется. тут страниц не много, полистайте
Айдар посмотрел видео и на русском и на английском разница в них только очередностью включения питания по усб и подключением FTDI адаптера. Пробовал так и эдак бутлоадер не отвечает. Менял скорость портов- молчит собака. И в конце пробовал через Flash loader - тоже самое. Может bootloader только с open pilot совместим. Через open pilot прошивается OPBL прошивка для inav или cleanflight, и легко откатывается на open pilot, без проблем. С OPBL прошивкой конектится в inav. Я уже думаю может FTDI адаптер не ( той системы), а…
Кто нибудь летает на OPBL прошивке?
я тоже долго мучился. пока не запаял перемычку и не прошил прогой из видео.
Отдал плату другу, он уже туда 5ю версию прошил, летает на коптере, доволен.
Перемычка запаяна.
Горит только зеленый светодиод.
Некоторые CC3D не прошиваются через UART. Не знаю, что там китайцы не так сделали. Телеметрия работает через эти порты, GPS работает. А CF и iNav не шьются. Все перепробовал, ничего не помогло. В итоге взял SPRF3 - все прошил с первой попытки.
Некоторые CC3D не прошиваются через UART.
А вы не проверяли объем памяти процессора? Много прошло через руки CC3D, и все прекрасно шились через Main port, за исключением некоторых китайских подделок, на которых стояли процы с 64 кб, вместо 128кб. То есть прошивка вроде как заливалась, но плата не запускалась потом. На них только OpenPilot прошивка влазила и работала.
Не проверял, но думаю проблема не в этом. Сейчас этих cc3d уже нет под рукой, чтобы проверить. Версия CF 1.10 поддерживала single binary file с расширением bin, который можно было залить через openpilot или librepilot через usb без танцев с uart. И вот она заливается и работает. А более новую версию ни одну не удалось залить. Cc3d было три штуки, все куплены у одного продавца. И все с одной и той же проблемой.
CC3D Atom - все отлично зашивается через FDTI свисток
с bin. версией прошивки, есть куча ограничений по функционалу.
Всем доброго времени суток. Купил я себе на замену cc3D spracing f3, но тут вылезла проблема: не работают ПВМ входы, а приемник Л9Р дальнобойный не распологает С.Бас выходом 😦 Что делать? рспознаются только 3 канала: Газ и два аукса. Команду chnnel forwarding пробовал. не помогло. Я в печали.
у frsky L9R есть sbus…
по PWM приемник к полетнику подключать сегодня как-то дико, если честно. Но если очень хочется, то нужно это делать в соответствии с руководством по подключению конкретно вашего контроллера
А кто знает, куда делись в последних версиях OPBL (Open Pilot Boot Loader) версии прошивок для СС3D? Досталась мне пара убогих контроллеров, у которых узкоглазые не распаяли ни майн, ни флекс порт. Вообще все цепи этих портов отсутствуют - ноги СТМ32 сидят на земле. Квалификации подпаяться к 0.5мм выводам не хватает. Я подсоединил GPS к софт порту и все летает, но последняя версия iNav, где была OPBL ноябрьская 1.3, с ней пока и летаю.
OPBL СС3D версия снята с поддержки ввиду нехватки памяти и ограниченности функционала, а с версии 1.7 (или 1.8 не помню точно) процы F1 перестанут поддерживаться.
Печалька. Тогда вопрос: можно ли прошиваться через swd порт? Его-то китайцы оставили.
А как понять, что не распаян Main port? У меня похожая проблема на одном экземпляре. Не шьётся, никакая периферия не работает на main-порту.
“А как понять, что не распаян Main port?” Элементарно. Нет разъема 😃 Впрочем у меня есть классический CC3D - путем визуального сравнения через лупу выяснил, что там вообще нога СТМ32 ответственная за main port сидит на земле и не хватает тройки резисторов-конденсаторов. Аналогичная картина для flex.
Понял, спасибо. Посмотрю под лупой.
Кстати для тех, кто никак не может прошить inav через ftdi адаптер: мне случайно попал в руки адаптер CP2102, так вот через него одна плата пролилась на ура. А я уже решил, что она безнадёжна. Проблема оказалась в FTDI, не знаю уж что с ним не так.
Есть информация какие датчики использует сейчас iNAV ? Стоит ли подключать компас, который на GPS или нет смысла?
Здравствуйте.
Может кто подскажет?
Взял на Али два Атома мини. И с двумя одно и тоже: при подключении через УСБ к компу не определяются com портами, а присваиваются как Human interface devices, HD-compliant vendor-definet device и USB Input Device. Через FTDI тоже никак. Boot запаивал. Ничего.
“Есть информация какие датчики использует сейчас iNAV ?” GPS (uart), компас (встроенный в плату и i2c отдельный), барометр(встроенный и i2c отдельный), датчики напряжения, тока, в том числе и встроенные в некоторые платы (смотреть в документации по iNav, описание конкретного контроллера), сонар (в основном на f3 платах, не проверял), i2c дисплей (не проверял) “Стоит ли подключать компас, который на GPS или нет смысла?” Если аппарат самолет, то не надо, как и барометр, ничего нужного они не принесут, более того компас может навредить, если неправильно настроен и не внесено магнитное склонение. Если аппарат коптер, то нужны оба - настроить компас непросто. Самонастройки, как на ардупилоте нет…
Ок, спасибо, значит компас идет лесом. Появился еще один вопрос. Кто летает на iNAV на самолете, используют ли мозги руддер при стабилизации и возврате? Собрал двухбалочный мелкий самолет 60см для быстрых полетов, руддера на нем нет, но есть поворот камеры по горизонтали, думаю будет удобно управлять стиком. Но на F3 мозге нельзя использовать PWM вместе с GPS, значит управление по PPM, вот и получается, что на поворотку сигнал руддера будет браться с мозга, и если мозг использует руддер в полете, будет косяк.
Раньше iNav не использовал рудер для управления самолетом. Насчет последних версий, надо спросить у разработчика. 2. На плате с stm32f3 процессором можно одновременно использовать pwm и gps. Там имеется 3 аппаратных uart-a и 2 программных (пользоваться можно только одним программным uart-ом, иначе, по крайней мере у меня, на sp racing f3, они оба работали с ошибками) Реально даже на stv32f1 можно, я летал в конфигурации сс3d + pwm + gps, хотя при этом уже не хватает uart-ов, чтобы подключить osd, если только не пользоваться i2c датчиками и забрать flex порт под osd, gps при этом на main порту. 3. Ничто не мешает подключить поворотную серву прямо к приемнику на 5 канал и выше.
Инав рулит хвостом для удержания курса, и если его не вырубить (пиды по “0”), то мешает самолетке делать разворот по кругу задирая нос.
Столкнуся с такой фигней. ПЛатка СС3Д квадратная, прошивка 1.6 при заходе в CLI прошивка слетает. После першивки работает, но настраивать надо по новой.
Кстати у меня почемуто иНав не першивает платы, а клинфлайт инавовские прошивки - запросто.
Использую только GPS без компаса и барометра. В меню MODES не отображаеться ни NAV ALTHOLD ни NAV POSHOLD. Так и должно быть или я что то не включил в настройках?
Какая версия iNAV? Можно прислать diff, я гляну. Но 99% что-то не то с настройками
В этом деле я новичек, прошу сильно неругать.
iNAV 1.71
diff:
# diff
# version
# INAV/SPRACINGF3 1.7.1 Jun 3 2017 / 08:13:23 (48e1feff)
# serial
serial 1 2 115200 38400 0 115200
serial 2 64 115200 38400 0 115200
# led
# color
# mode_color
# aux
aux 0 0 0 1875 2100
aux 1 1 5 900 1125
aux 2 2 5 1375 1650
aux 3 4 5 1875 2100
aux 4 18 5 1125 1325
# adjrange
# rxrange
# master
set gyro_sync = ON
set gyro_hardware_lpf = 188HZ
set gyro_lpf_hz = 90
set gyro_notch1_hz = 200
set gyro_notch1_cutoff = 100
set acc_hardware = MPU6050
set acczero_x = 161
set acczero_y = -55
set acczero_z = -371
set accgain_x = 4090
set accgain_y = 4074
set accgain_z = 4020
set mag_hardware = NONE
set baro_hardware = NONE
set serialrx_provider = SBUS
set motor_pwm_rate = 1000
set motor_pwm_protocol = ONESHOT125
set failsafe_procedure = RTH
set align_board_yaw = 900
set gps_sbas_mode = AUTO
# profile
profile 1
set mc_p_pitch = 58
set mc_i_pitch = 50
set mc_d_pitch = 22
set mc_p_roll = 43
set mc_i_roll = 40
set mc_d_roll = 20
set mc_p_yaw = 70
set dterm_lpf_hz = 80
set dterm_notch_hz = 200
set dterm_notch_cutoff = 100
set roll_rate = 50
set pitch_rate = 50
set yaw_rate = 45
#
То есть коптер? так как не вижу строки
mixer FLYING_WING
Для коптера необходимы компас и баро, если планируется использовать навигационные авто-режимы
Понял. Спасибо.
Все залилось и завелось на CC3C атом. GPS увиделось на main порту без проблемм.
Попытался подключить BME280 на флекс порт. Не видит его борда хоть убей. В настройках ставил и авто выбор и BMP280.
Кто может сказать по какому I2C адресу его ищет прошивка, где можно посмотреть. Пробовал менять перемычкой адреса 76и 77. Пофиг.
Да и почему то в MODES нет RTH? А собственно из за этого завелся…
Получается не поддержан барометр в прошивке CC3D.
Прошивка CC3D inav 1.7.2_CC3D_PPM1.hex (344kb)
Конфигуратор 1.7.2
Пробовал подключать и BMP280 и BME280 на FLEX port. И адрес менял 0х76, 0х77. Flex port рабочий, прозванивал связь с ногами проца. Обрыва и кз нет.
Барометры предварительно проверены ардуинкой тестовым скетчем.
А жаль! Жаль убитого в пустую времени.
В OpenPilot всё работает. В iNav ESC не пикает, серво не работает. В разделе Receiver показывает что стики от передатчика работает.
Где я что то пропустил?
Здравствуйте!
Извините за НУБство, я новичок в этом деле.
Приобрел вот такой полетный контроллер для Ranger G2, но куда не ткнусь, везде по квадрокоптеры пишут. Подскажите, где скачать Openpilot с настройкой для самолета и если возможно, то на русском. Мне необходимо его заставить работать как стабилизатор полета.
Спасибо!
Иван, ну вообще-то здесь тема по айнаву. Поэтому, если вы зальете в этот контроллер айнав, то будет вам стабилизатор полета. Смотрите начало темы, Константин все очень подробно расписал
При запуске Айнав закрывается (Хром выдает ошибку), контроллер никак не отображается в системе. Впервые пытаюсь использовать такие “железяки”. На контроллер нужно подавать внешнее питание, по USB не достаточно?
нада
Залил на CC3D inav_1.3.0_CC3D_OPBL.bin .Всё залилось.Запускаю ИНАВ конфигуратор,всё находит и подсоединяется.На этапе подключения GPS датчика BN-880,вышел затык.Я перепутал подпайку двух проводков,RX и TX.Поменяв их местами,конфигуратор снова стал запускаться.Зайдя во вкладку Configuration,там где написано GPS,я активировал бегунок,он стал синий,в окошке Protokol выставил NMEA.В окошке “Гроунд ассистансе тупе”,выставил Аутодетект.Окошко с магнетометром не трогал,там по нулям. Вопрос,надо ли корректировать настройку самого GPS датчика в программе U-center? Если да,то какие характеристики там выставлять именно что бы всё срослось с CC3D ?
Все не так.
в прошивках под CC3D выключена поддержка NMEA. Для корректной работы gps в inav на CC3D нужен приемник ublox или совместимый (BN-880 подходит). Подключить приемник корректно к полетному контроллеру, активизировать функцию gps в настройках портов и включить в Configuration возможность gps и протокол UBLOX. inav сам настроит модуль gps.
Вся загвоздка была именно как ПРАВИЛЬНО активизировать в ИНАВе , во вкладке Конфигуратион сам ЖПС. Я то думал что там активируются сначала сами строки этими бегунками,(две верхние автоматически активированы),а затем уже выставляется ЖПС и жмётся “Саве”. Видос там я залил короткий,как пытался всё поделать.))
Подключил CC3D к компу через стандартный УСБ разьём , стандартным (не ttl кабелем).Подал питание на колодку что для рулевых машинок и регулятора оборотов. CC3D засиял синим и заморгал жёлтым. Но ИНАВ не подключился.Я завис.Везде пишут что должен подключится.Залез в дебри форума.Нашёл что кто то,вот точно так же пытался подсоединить и ничего.Нашёлся добрый человек,подсказал.Оказывается,сначала надо запитать от УБЕКа регуля колодку на CC3D,он засветится и только потом,подсоединять кабель к компу.Я проделал всё именно в этой последовательности.И о чудо,комп распознал всё сразу. ИНАВ запустился и соединился с CC3D.Включил Турнигу. Приёмник,заранее привязанный к передатчику,активировался.Зайдя во вкладку ИНАВа,в “Receiver” , попробовал подвигать рукоятками на Турниге. На экране полоски не двигаются.Что делать?
Что делать?
имхо пора накатить.
три раза по сто, под хорошую закусочку,
с наступающим )
не все очевидно конструктивное является таковым на самом деле, в конкретном случае нужно выждать
Вы наверно уже это проделали.)) Всё таки как никак канун НГ (Новый год).
Если нечего конструктивно предложить в нужном ключе и правильном разрезе по решению вопроса,зачем засорять ветку по теме?
“Приёмник,заранее привязанный к передатчику,активировался.Зайдя во вкладку ИНАВа,в “Receiver” , попробовал подвигать рукоятками на Турниге. На экране полоски не двигаются.Что делать?”
Какой приемник (вернее, какой протокол у приемника)? Во вкладке конфига правильно указали тип сигнала с приемника? Порт для этого приемника настроен? Правильно вам сказали, что нужно накатить - вы не дали необходимой информации, а без бутылки тут не разобраться 😃
Ура товарищщи!!! Радостная непонятка!! Во вкладке “Конфигуратион”, в “Receiver Mode” блуждая по выбору протоколов,я от нечего делать решил применить народный метод “случайного тыка”. Открыв варианты радиопротоколов связи передатчик-приёмник, заменил (просто так) выбранный там PWM RX input (one wire per channel), на PPM RX input. Сохранил. ИНАВ перезагрузился. Лезу во вкладку Recriver.Смотрю,что то полосочки цветные верхние как то не так вытянуты.Я подвигал рукоятками на Турниге и они отозвались пропорционально движению!!! И теперь вот думаю,ну что так через Ж…пу всё у них в настройках и всё так не логично! Отчего не телеметрийный приёмник работает в якобы телеметрийном режиме???
Два дня убил на это всё.) Но было ощущение,что сдвинусь с этой “мёртвой” точки.))
Вот фотка приёмника моего и там видно как китайцы распаяли кабель.Я потом переставлял их местами .Тот белый,что из цельного разьёма,я вытащил и всунул вместо него тот,что рядом с красным идёт.Третий слева. Так якобы правильно. drive.google.com/file/d/…/view?usp=sharing
Как бы стало проясняться.Та часть графики и символов,что не отображается ОСД,должны проявиться после нахождения спутников и активации системы в пространстве.(Точка позиционирования по ЖПС).Тогда якобы появится стрелка указывающая “Дом” и прочее. Какое минимальное количество спутников и где надо их выставить,вот что нужно узнать.
Как настраивается режим ФС, на приёмнике с ППМ, аппаратуры Флайскай ,для полётников с ИНАВом ?
Товрищи, а подскажите, почему такая фигня может быть. Поставил на свой CC3D inav последней версии (для CC3D последняя - 1.7.3). Конфигуратор той же версии, хотя пробовал и свежайший 😃
В общем не запускается процесс 6-шаговой калибровки акселя. Нажимаю кнопку Accelerometer Calibration - пишет “Calibration Started”, затем проходит две секунды и “Calibration finished”. В калибровачных константах пусто (4096). И хоть ты тресни. Обидно прям.
Ради интереса поставил CleanFlight - там проблем нет, но там и процедура не 6-шаговая. Положил на стол, откалибровал, можно летать.
а возможно ли INAV конфигуратор подключить к данному контроллеру не через USB, а через какой-нибудь UART?
Да, просто нужно включить на вкладке портов для этого UART режим MSP
Здравствуйте! Почему то не включается флажок на вкладке Failsafe…Может сталкивался кто с таким…
Здравствуйте! Возможно ли INAV установить на Mini CC3D Atom ru.aliexpress.com/item/32869503095.html для стабилизации мотопланера? Какие еще плюшки будут доступны для этой модели контроллера? Соединение с приемником по SBUS/PPM. Задача - минимизировать вес.
Прошу вашего совета (копия сообщения из обсуждения)
Здравствуйте! Возможно ли INAV установить на Mini CC3D Atom…
Михаил, приветствую.
Конечно можно. Подойдёт какая нибудь старая версия INAV - младше 1.7.3 (включая) , потому что года так с 2017 слабые микроконтроллеры (ниже f3 утратили поддержку). Не знаю какие плюшки нужны, но если поставить GPS то будет прилетать домой. Стабилизация полёта, автовзлет, авто посадка (нужно поле), контроль батареи, телеметрия на экране пульта. Так как у этого полетника катастрофически мало uart, то нужно ограничить себя в периферии. Если приемник sbas, то без osd, или телеметрии и тд
Константин, спасибо. Заказал АТОМ, как придет, буду пробовать прошивать, правда опыта нет…
На первой странице Вы упоминали о проекте “типа vtol”, как продвигается работа в этом направлении?
Доброго! Подскажите. Нашел в закромах сию плату и решил помучить жертвенный пенолет. Интересует поддержка CC3D функции NAV LAUNCH, cli команды типа nav_fw_launch_velocity =300 не принимает, может надо что-то активировать в других настройках?
Автовзлет доступен только для полётных контроллеров на базе f3. А cc3d уже ну очень ископаемое. Не знаю полезное ли. Хотя у меня есть пара крыльев для рейсинга на cc3d и под INAV (даже не знаю какой версии).
Сделал как в инструкции, но самолет не армится.
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"43258e403df955007778f3b4":{"_id":"43258e403df955007778f3b4","hid":9090,"name":"SSergo","nick":"SSergo","avatar_id":null,"css":""},"4572e2133df9550077787a9c":{"_id":"4572e2133df9550077787a9c","hid":18681,"name":"soliada","nick":"soliada","avatar_id":null,"css":""},"463efb2c3df955007778479b":{"_id":"463efb2c3df955007778479b","hid":22882,"name":"dollop","nick":"dollop","avatar_id":null,"css":""},"4741bd143df955007777fc51":{"_id":"4741bd143df955007777fc51","hid":29285,"name":"dROb","nick":"dROb","avatar_id":null,"css":""},"47c524233df955007777d3fb":{"_id":"47c524233df955007777d3fb","hid":32012,"name":"Дока","nick":"Дока","avatar_id":null,"css":""},"4831a8b63df955007777ac33":{"_id":"4831a8b63df955007777ac33","hid":34654,"name":"mishaXXyears","nick":"mishaXXyears","avatar_id":null,"css":""},"4af6f0963df9550077768163":{"_id":"4af6f0963df9550077768163","hid":56258,"name":"Realtek","nick":"Realtek","avatar_id":null,"css":""},"4b4dca253df9550077765d48":{"_id":"4b4dca253df9550077765d48","hid":59428,"name":"hudognik","nick":"hudognik","avatar_id":null,"css":""},"4b811a0e3df9550077764218":{"_id":"4b811a0e3df9550077764218","hid":61565,"name":"Yanchak","nick":"Yanchak","avatar_id":null,"css":""},"4b9ea95c3df95500777632e3":{"_id":"4b9ea95c3df95500777632e3","hid":62812,"name":"Wowic","nick":"Wowic","avatar_id":null,"css":""},"4c0957443df9550077760211":{"_id":"4c0957443df9550077760211","hid":67065,"name":"Shuricus","nick":"Shuricus","avatar_id":null,"css":""},"4c7817af3df955007775d178":{"_id":"4c7817af3df955007775d178","hid":71015,"name":"siderat","nick":"siderat","avatar_id":null,"css":""},"4dac6c603df95500777538c6":{"_id":"4dac6c603df95500777538c6","hid":86272,"name":"Serj=","nick":"Serj=","avatar_id":null,"css":""},"4e71d4e23df955007774e5d8":{"_id":"4e71d4e23df955007774e5d8","hid":99365,"name":"alexeykozin","nick":"alexeykozin","avatar_id":null,"css":""},"4e9937213df955007774d37b":{"_id":"4e9937213df955007774d37b","hid":102396,"name":"vjick","nick":"vjick","avatar_id":null,"css":""},"4fb654ce3df9550077744420":{"_id":"4fb654ce3df9550077744420","hid":119583,"name":"alezalez","nick":"alezalez","avatar_id":null,"css":""},"4fd6c96a3df95500777436be":{"_id":"4fd6c96a3df95500777436be","hid":120796,"name":"Ri777","nick":"Ri777","avatar_id":null,"css":""},"4ff32b533df95500777428a5":{"_id":"4ff32b533df95500777428a5","hid":121894,"name":"JKKrim","nick":"JKKrim","avatar_id":null,"css":""},"503c8d213df9550077740839":{"_id":"503c8d213df9550077740839","hid":124498,"name":"grafis","nick":"grafis","avatar_id":null,"css":""},"50e32c6d3df955007773c37e":{"_id":"50e32c6d3df955007773c37e","hid":132212,"name":"Роман_С_А","nick":"Роман_С_А","avatar_id":null,"css":""},"50f93f013df955007773b561":{"_id":"50f93f013df955007773b561","hid":134222,"name":"Meesha","nick":"Meesha","avatar_id":null,"css":""},"5113f6013df955007773a550":{"_id":"5113f6013df955007773a550","hid":136792,"name":"N0_PrimA","nick":"N0_PrimA","avatar_id":null,"css":""},"514c27d63df95500777387f5":{"_id":"514c27d63df95500777387f5","hid":143966,"name":"avo-18","nick":"avo-18","avatar_id":null,"css":""},"51963a833df9550077736852":{"_id":"51963a833df9550077736852","hid":153991,"name":"А-лекс","nick":"А-лекс","avatar_id":null,"css":""},"521f4b363df9550077732c11":{"_id":"521f4b363df9550077732c11","hid":171944,"name":"KarlosRClv","nick":"KarlosRClv","avatar_id":null,"css":""},"52d3bca73df955007772d8b9":{"_id":"52d3bca73df955007772d8b9","hid":193089,"name":"lentyay","nick":"lentyay","avatar_id":null,"css":""},"52fc22ce3df955007772c413":{"_id":"52fc22ce3df955007772c413","hid":195662,"name":"Frai","nick":"Frai","avatar_id":null,"css":""},"541c9baa3df95500777256d2":{"_id":"541c9baa3df95500777256d2","hid":207993,"name":"Newbie74","nick":"Newbie74","avatar_id":null,"css":""},"550e7acb3df955007771f3fb":{"_id":"550e7acb3df955007771f3fb","hid":220656,"name":"emax","nick":"emax","avatar_id":null,"css":""},"55dccc4c3df955007771a1d3":{"_id":"55dccc4c3df955007771a1d3","hid":232441,"name":"sa64","nick":"sa64","avatar_id":null,"css":""},"55e335993df9550077719f5f":{"_id":"55e335993df9550077719f5f","hid":232929,"name":"higin","nick":"higin","avatar_id":null,"css":""},"55f7130c3df95500777196cc":{"_id":"55f7130c3df95500777196cc","hid":234224,"name":"Воздух","nick":"Воздух","avatar_id":null,"css":""},"569411263df95500777154b4":{"_id":"569411263df95500777154b4","hid":243688,"name":"segaru1","nick":"segaru1","avatar_id":null,"css":""},"56d168503df9550077713b32":{"_id":"56d168503df9550077713b32","hid":246691,"name":"hap","nick":"hap","avatar_id":null,"css":""},"56e051cb3df9550077713465":{"_id":"56e051cb3df9550077713465","hid":247345,"name":"OverLock","nick":"OverLock","avatar_id":null,"css":""},"57a11a1b3df955007770ec58":{"_id":"57a11a1b3df955007770ec58","hid":254596,"name":"Hollod","nick":"Hollod","avatar_id":null,"css":""},"592c865d3df95500777064f8":{"_id":"592c865d3df95500777064f8","hid":286524,"name":"cjt122","nick":"cjt122","avatar_id":null,"css":""},"594931a03df9550077705a7c":{"_id":"594931a03df9550077705a7c","hid":289450,"name":"Bur_Ivan","nick":"Bur_Ivan","avatar_id":null,"css":""},"5d05457d3df95500776f8998":{"_id":"5d05457d3df95500776f8998","hid":345123,"name":"imale","nick":"imale","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"56c62822997073007711441d","hid":21422,"title":"iNAV на CC3D - самый бюджетный автопилот с функцией RTH для самолета","html":"<p>Запишу в дневник, чтобы не забыть, да и пригодится может кому…<br>\nДа, это не полный и исчерпывающий мануал по iNAV, а пример настройки АП под конкретный тип ЛА.</p>\n<p><strong data-nd-pair-src=\"**\">Кроме того, этой записи в дневнике исполнился год. А за год в iNAV произошли существенные изменения. И только в лучшую сторону. Поэтому тут в тексте многое исправлено и дополнено. Актуально на конец февраля 2017. Версия iNAV 1.6.</strong></p>\n<!--cut-->\n<p>В поисках кандидата легкого, не дорого комплекта АП для мелкого FPV самолета взор упал на давно приобретенную плату CC3D. Поставив ее на самолет и без труда настроив OpenPilot захотелось большего, а именно возврата домой. В результате после изучения темы всплыли две возможности:</p>\n<ul>\n<li><a href=\"http://fotoflygarn.blogspot.co.il/2015/01/baseflight-fixedwing.html\" class=\"link link-ext\" data-nd-link-orig=\"http://fotoflygarn.blogspot.co.il/2015/01/baseflight-fixedwing.html\" target=\"_blank\" rel=\"nofollow noopener\">прошивка Патрика</a> (базируется на baseflight)</li>\n<li><a href=\"https://github.com/iNavFlight/inav\" class=\"link link-ext\" data-nd-link-orig=\"https://github.com/iNavFlight/inav\" target=\"_blank\" rel=\"nofollow noopener\">iNAV </a>(базируется на cleanflight)<br>\nИмея не очень успешный опыт эксплуатации прошивки Патрика на multiwii, прочитав наискось <a href=\"http://fpvlab.com/forums/showthread.php?27854-NAZE32-for-fixed-wing\" class=\"link link-ext\" data-nd-link-orig=\"http://fpvlab.com/forums/showthread.php?27854-NAZE32-for-fixed-wing\" target=\"_blank\" rel=\"nofollow noopener\">его тему на http://fpvlab.com</a>, найдя фразу Патрика же, что его прошивке до iNAV очень далеко, у меня остался только один вариант. А почитав в основном положительные отзывы по системе навигации iNAV вообще развеялись все сомнения.</li>\n</ul>\n<p><strong data-nd-pair-src=\"**\">Что потребуется:</strong></p>\n<ol>\n<li>Полетный контроллер CC3D или <a href=\"https://github.com/iNavFlight/inav/blob/master/docs/Boards.md\" class=\"link link-ext\" data-nd-link-orig=\"https://github.com/iNavFlight/inav/blob/master/docs/Boards.md\" target=\"_blank\" rel=\"nofollow noopener\">совместимый с iNAV</a> (от $13)</li>\n<li>OSD (minimOSD или любое другое поддерживающее cleanflight) (от $8)</li>\n<li>GPS приемник (от $10)<br>\nИтого, на АП, gps и osd вышло менее $32</li>\n<li>FPV комплект, самолет, РУ, батареи и т.п. это и так понятно.<br>\nФото подопытного ЛА:<br>\n<span class=\"image\" style=\"width: 858px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2016/02/73f5970b3919dc3455c127c757de3dda.jpg\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2016/02/73f5970b3919dc3455c127c757de3dda.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0583%\"></span></span> <span class=\"image\" style=\"width: 858px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2016/02/e3faf69849bd10b18e6459fc27ac4b75.jpg\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2016/02/e3faf69849bd10b18e6459fc27ac4b75.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0583%\"></span></span><br>\nПилот может смотреть по сторонам. На мир с высоты смотрю глазами миньена <span class=\"emoji emoji-smiley\" data-nd-emoji-src=\":smiley:\">😃</span></li>\n</ol>\n<p>Получил удовольствие от настройки iNAV, и использования - самолет летает, отлично управляется и летает в стабилизированных режимах, возвращается домой. В RTH имеется возможность изменять высоту возврата в полете при помощи стика РВ.</p>\n<p>Начнем (для увеличения изображений правый клик на нем мышей и открыть в новой вкладке).</p>\n<p><strong data-nd-pair-src=\"**\">1. Прошивка iNAV в CC3D.</strong><br>\nНичего необычного в процессе нет.<br>\nКачаем скомпилированную прошивку под наш тип платы отсюда <a href=\"https://github.com/iNavFlight/inav/releases\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://github.com/iNavFlight/inav/releases\" target=\"_blank\" rel=\"nofollow noopener\">github.com/iNavFlight/inav/releases</a><br>\nА далее существует куча мануалов как на CC3D залить стороннюю прошивку. Например <a href=\"https://www.youtube.com/watch?v=rHjzpMJmr_0\" class=\"link link-ext\" data-nd-link-orig=\"https://www.youtube.com/watch?v=rHjzpMJmr_0\" target=\"_blank\" rel=\"nofollow noopener\">тут </a>и <a href=\"http://drone-irk.ru/?p=3342\" class=\"link link-ext\" data-nd-link-orig=\"http://drone-irk.ru/?p=3342\" target=\"_blank\" rel=\"nofollow noopener\">тут </a>. Единственное отличие, что для прошивки выбираем скачанный файл iNAV.<br>\nС выходом версии 1.2 для CC3D необходимо делать выбор между двумя прошивками CC3D и CC3D_PPM1. Разница очевидна - если используется приемник с выходом PPM (что очень рекомендуется) то качаем одноименную прошивку.</p>\n<p><strong data-nd-pair-src=\"**\">2. Базовая настройка</strong><br>\nНастройку полетного контроллера начиная с <em data-nd-pair-src=\"_\">iNAV 1.6 лучше начинать с закладки Presets.</em> Здесь можно выбрать тип ЛА и за один клик настроить множество параметров.</p>\n<p>Далее будем более тонко настраивать iNAV под себя. Начнем с последовательных портов. Настройка портов выполняется на вкладке Ports.<br>\n<strong data-nd-pair-src=\"**\">Вкладка Ports</strong><br>\n<span class=\"image\" style=\"width: 1114px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/631dc2afa3f22266a8308532735b836e.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/631dc2afa3f22266a8308532735b836e.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.9659%\"></span></span></p>\n<ul>\n<li>UART1 оставляем без изменения (по-умолчанию), к нему будет подключено ОСД или FTDI для настройки с компьютера</li>\n<li>UART3 будет занят для GPS. Соответственно и включаем эту функцию и выбираем необходимую скорость на порту.<br>\nМогу заметить, что применяя GPS приемники ublox серии 6-8 нет необходимости их подключения к компьютеру и конфигурирования при помощи u-center. iNAV все сделает сам.</li>\n</ul>\n<p><strong data-nd-pair-src=\"**\">Калибровка акселерометра.</strong><br>\nСейчас у iNAV используется <a href=\"https://github.com/iNavFlight/ru_wiki/wiki/4.-%D0%9A%D0%B0%D0%BB%D0%B8%D0%B1%D1%80%D0%BE%D0%B2%D0%BA%D0%B0-%D1%81%D0%B5%D0%BD%D1%81%D0%BE%D1%80%D0%BE%D0%B2\" class=\"link link-ext\" data-nd-link-orig=\"https://github.com/iNavFlight/ru_wiki/wiki/4.-%D0%9A%D0%B0%D0%BB%D0%B8%D0%B1%D1%80%D0%BE%D0%B2%D0%BA%D0%B0-%D1%81%D0%B5%D0%BD%D1%81%D0%BE%D1%80%D0%BE%D0%B2\" target=\"_blank\" rel=\"nofollow noopener\">шеститочечная калибровка акселерометра</a>. Сложного в ней ничего нет. Ориентируем плату в соответствии с изображением и нажимаем одну единственную кнопку. И так шесть раз. <em data-nd-pair-src=\"_\">Главное, на что следует обратить внимание так это на то, что ориентация на изображениях инструкции по калибровке - это ориентация полетного контроллера, а не летательного аппарата.</em> Поэтому, чтоб не путаться я провожу калибровку полетника, а уже потом устанавливаю его в самолет.</p>\n<p><strong data-nd-pair-src=\"**\">Конфигурация (закладка Configuration)</strong><br>\nПереходим на вкладку Configuration и выбираем тип летательного аппарата - Airplane. Так как у меня классический самолет с хвостовым оперением. Для тех у кого летающее крыло, необходимо выбрать соответствующую опцию.<br>\n<span class=\"image\" style=\"width: 1107px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/cbcafe5219dcc85798b0cf2e2a86fcde.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/cbcafe5219dcc85798b0cf2e2a86fcde.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.2782%\"></span></span><br>\nНе обращаем внимания на нумерацию серв/каналов на картинке. Они не очень совпадают с действительностью.</p>\n<p><strong data-nd-pair-src=\"**\">Ориентация платы.</strong><br>\nТак как полетный контроллер можно устанавливать в самолет под любым удобным углом, то нужно настроить соответственно iNAV. Для этого переходим на закладку Configuration и в разделе Board and sensor Alignment устанавливаем желаемые углы. Например, если у вас полетный контроллер установлен так, что USB разъем “смотрит” влево по направлению полета, то устанавливаем Yaw degrees = 90. Если USB разъем получился слева, то Yaw degrees = 270. Раньше такие настройки выполнялись только из CLI. Если будете делать эти настройки там, то нужно иметь ввиду, что у iNav единицы углов равны deg*10 то есть для 90 градусов в терминале (CLI) выполняем команду</p>\n<pre class=\"hljs\"><code>set align_board_yaw=900\n</code></pre>\n<p>для 270 градусов -</p>\n<pre class=\"hljs\"><code>set align_board_yaw=2700\n</code></pre>\n<p>Для сохранения изменений сделанных в CLI нужно дать команду save и нажать enter.</p>\n<p>После этого, <em data-nd-pair-src=\"_\">подключим все оборудование</em> по такой схеме (это вариант с PPM Receiver). Еще раз отмечу, что вариант с PPM приемником более предпочтителен, чем следующий вариант с Parallel PWM, хотя бы потому что открываются возможности для телеметрии (SOFSERIAL) и подключение аналоговых сигналов для считывания напряжения, тока, RSSI.<br>\n<span class=\"image\" style=\"width: 2853px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2016/02/c98cfcf64df8a8a7645429dc7ac4c0ea.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2016/02/c98cfcf64df8a8a7645429dc7ac4c0ea.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 70.1016%\"></span></span></p>\n<p>Или по такой схеме (это вариант с Parallel PWM Receiver):<br>\n(<a href=\"http://s8.hostingkartinok.com/uploads/images/2016/02/a47fb019c7783371053239a3d23a8d46.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://s8.hostingkartinok.com/uploads/images/2016/02/a47fb019c7783371053239a3d23a8d46.jpg\" target=\"_blank\" rel=\"nofollow noopener\">Фото реального hardware</a>):<br>\n<span class=\"image\" style=\"width: 2763px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2016/02/4e641362191528c42758d626757b747a.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2016/02/4e641362191528c42758d626757b747a.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 72.3851%\"></span></span></p>\n<p>Оставаясь на вкладке Configaration настраиваем следующее:<br>\nЕсли не хочется, чтобы самолет крутил двигателем при арминге, то включаем свитч “Don’t spin the motors when armed”.</p>\n<p>Включим и возможность работы с GPS. Выбирать протокол нет необходимости - у CC3D есть возможность общаться только по UBX.<br>\n<span class=\"image\" style=\"width: 1107px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/299f7c79a6293db997088e129a696caf.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/299f7c79a6293db997088e129a696caf.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.2782%\"></span></span><br>\nПосле включения функции GPS iNav не будет армиться без GPS fix. Если хочется проверить что арм работает то можно отключить эту проверку в CLI: “set nav_extra_arming_safety = OFF”. Не забываем ее включить обратно для реальных полетов!</p>\n<p>Так как у меня приемник PPM, то кроме всего прочего CC3D под управлением iNAV позволит мониторить напряжение батареи, ток потребляемый в полете, RSSI приемника. Все эти опции присутствуют с правой стороны конфигуратора на закладке Configuration.</p>\n<p>В группе Other Features я включил Telemetry и SOFTSERIAL. Последняя опция позволяет использовать пины 4 и 5 входов как программный UART, когда не хватает аппаратных, в моем случае я его использую для FR-SKY телеметрии. Если уж зашла речь за нее, то нужно не забывать, что у FR-SKY UART инверсный. Но никаких аппаратных инверторов городить не нужно - разработчики iNAV позаботились. Идем в CLI и активируем инверсию на порту:</p>\n<pre class=\"hljs\"><code>set telemetry_inversion = ON\n</code></pre>\n<p>И после этого подключаем пин RX FR-SKY приемника к пину 4 CC3D (<a href=\"https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20CC3D.md\" class=\"link link-ext\" data-nd-link-orig=\"https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20CC3D.md\" target=\"_blank\" rel=\"nofollow noopener\">TX от SOFTSERIAL</a>)<br>\n<span data-nd-image-orig=\"https://s8.hostingkartinok.com/uploads/images/2017/02/6225dccbbba4b642e70ef2282dcd57c4.jpg\"><a class=\"link link-ext link-auto\" href=\"https://s8.hostingkartinok.com/uploads/images/2017/02/6225dccbbba4b642e70ef2282dcd57c4.jpg\" data-nd-link-orig=\"https://s8.hostingkartinok.com/uploads/images/2017/02/6225dccbbba4b642e70ef2282dcd57c4.jpg\" target=\"_blank\" rel=\"nofollow noopener\">s8.hostingkartinok.com/…/6225dccbbba4b64…</a> (1.3 MB)</span></p>\n<p><strong data-nd-pair-src=\"**\">Вкладка Receiver</strong><br>\nЗдесь контролируем, что реакция каналов управления соответствует движениям стиков передатчика. Если нужно то ставим реверсы в передатчике. Но для Turnigy и Taranis этого не потребовалось. Короче, поведение должно быть таким:</p>\n<ul>\n<li>Стик газа (Throttle) от себя - значение канала увеличивается</li>\n<li>Стик руля направления (Rudder) отклонятся вправо - значение канала увеличивается</li>\n<li>Стик руля высоты (Elevator) от себя - значение канала увеличивается</li>\n<li>Стик элеронов (Ailerons) отклонятся вправо - значение канала увеличивается</li>\n</ul>\n<p><span class=\"image\" style=\"width: 1114px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/b2199bbbb760c7c7c1b3699c89cc4883.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/b2199bbbb760c7c7c1b3699c89cc4883.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.8761%\"></span></span></p>\n<p><strong data-nd-pair-src=\"**\">Вкладка Modes</strong><br>\nНа вкладке Modes нужно настроить соответствие режимов полета положению каналов AUX. На AUX я настроил трехпозиционный свитч. С тем как настроено у меня на картинке получается следующее:</p>\n<ul>\n<li>минимальное значение канального импульса - работают одни гиры. Взлет самолета - просто песня. Взял за фюзеляж, нос градусов 10-20 вверх поднял, газу на 80-100%, самолет отпустил. Он под этим углом идет в небо. Без просадок, виляний и пр.</li>\n<li>среднее значение - Angle. Тем, кто любит фпв пилотаж, полюбят режим Horizon <span class=\"emoji emoji-smiley\" data-nd-emoji-src=\":smiley:\">😃</span></li>\n<li>максимальное значение - RTH. Летим домой. Все автоматические режимы в iNAV самодостаточные. То есть к RTH не нужно включать ANGLE или еще чего-нибудь.<br>\n<span class=\"image\" style=\"width: 1121px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/60c42df3c50ead25347f0252b51f55da.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/60c42df3c50ead25347f0252b51f55da.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 105.3524%\"></span></span></li>\n</ul>\n<p><strong data-nd-pair-src=\"**\">Вкладка Failsafe</strong><br>\nНаконец-то! Начиная с версии 1.6 у iNAV появился простой и прозрачный фейлсейф.<br>\nДля работы фейлсейфа необходимо следующее:</p>\n<ul>\n<li>настроить приемник так, чтобы он не выдавал никаких сигналов при выключенном передатчике</li>\n<li>или назначить на положение одного из AUX каналов режим Failsafe и сделать так, чтобы при выключенном передатчике этот канал приводил к срабатыванию Failsafe.</li>\n</ul>\n<p>Так как у меня FR-SKY D4R-II, то выбор очевиден - настраиваю так, чтоб приемник был в режиме no-pulses при фейлсейф. Для этого просто нажимаем кратко кнопку bind на приемнике при выключенном передатчике. Кроме этого, устанавливаем поведение самолета в режиме failsafe. В моем случае я выбрал возврат домой.<br>\n<span class=\"image\" style=\"width: 1114px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/f91f666e2b97dce17462bb6534592519.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/f91f666e2b97dce17462bb6534592519.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 80.6104%\"></span></span><br>\nКстати сказать, настройку ФС я невольно проверил. Работает. А дело было так. Одна из первых посадок получилась довольно жесткая - не удивительно, самолет размахом 65см и массой около 600г <span class=\"emoji emoji-smiley\" data-nd-emoji-src=\":smiley:\">😃</span>. Во время этой посадки самолет повел себя так. Ударившись о землю с газом в 0, он резко ожил и дал полный газ, но врезался в кактус, который и остановил аппарат от взлета и набора высоты и кружения в RTH. Это была случайность, которая избавила меня от необходимости стоять и ждать пока сядет акк и самолет рухнет на землю. Короче, при детальном рассмотрении отпал из CC3D приемник от удара при посадке.</p>\n<p>После лирического отступления идем на вкладку Motors</p>\n<p><strong data-nd-pair-src=\"**\">Вкладка Motors</strong><br>\nНа этой вкладке берем в руки самолет, качаем его по осям и смотрим, какие из ползунков шевелятся в зависимости от углов наклона по PITCH и ROLL. Можно запомнить или записать. ROLL - 4,5; PITCH - 3, YAW - 6.<br>\n<span class=\"image\" style=\"width: 1114px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/6996d5db9400c8d5330fc10bde0817a8.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/6996d5db9400c8d5330fc10bde0817a8.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.9659%\"></span></span></p>\n<p><strong data-nd-pair-src=\"**\">Вкладка Servos</strong><br>\nВключаем передатчик, устанавливаем режим Angle или Horizon. Переходим на вкладку Servos.<br>\n<span class=\"image\" style=\"width: 1114px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/baafb90dc93d5553a945b684dd2f4ac8.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/baafb90dc93d5553a945b684dd2f4ac8.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 64.3627%\"></span></span><br>\nТут внимательно. Я, например, на неделю позже взлетел на iNAV из-за реверса элеронов, которая обнаружилась на первой секунде полета <span class=\"emoji emoji-smiley\" data-nd-emoji-src=\":smiley:\">😃</span>. На этой вкладке настраиваем конечные и среднюю точки, расходы, а так же реверсы рулей для режимов стабилизации. Нумерация серв на этой вкладке начинается с 0! Для РВ, наклоняем хвост вниз, РВ должен должен опуститься. Если же РВ поднимается, то необходимо установить Rate (самый правый выпадающий список) Servo 2 с отрицательным знаком. Наклоняем левое крыло вниз. Левый элерон должен должен опуститься вниз, а правый подняться вверх. Если что-то не так, то исправляем установкой отрицательных Rate для Servo 3 и Servo 4 (если элероны подключены к одному каналу через Y-кабель, то достаточно поменять настройку только одного из каналов). Далее отводим хвост влево, руль направления должен отклониться влево. Если не так, то устанавливаем отрицательный Rate для Servo 5.<br>\n<em data-nd-pair-src=\"_\">Обратите особое внимание, что все конечные точки, нейтрали, триммеры настраиваются на той вкладке, а <strong data-nd-pair-src=\"**\">не в передатчике!</strong></em></p>\n<p><strong data-nd-pair-src=\"**\">3. Переходим к OSD</strong><br>\nЯ использую minimOSD и micro minimOSD. В них нужно прошить стороннюю прошивку - <a href=\"http://www.mwosd.com/\" class=\"link link-ext\" data-nd-link-orig=\"http://www.mwosd.com/\" target=\"_blank\" rel=\"nofollow noopener\">MWOSD</a>. На данный момент MWOSD претерпевает значительные изменения - добавляются протоколы, новые возможности, опять же-таки появился глючный конфигуратор под chrome…<br>\nПо ссылке выше присутствует install guide. Но там все как обычно: прошивка через среду Arduino (желательно скачать самую свежую с оффсайта), запуск конфигуратора, прошивка шрифтов через конфигуратор. Настройка параметров. Скрин параметров:<br>\n<span class=\"image\" style=\"width: 1217px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/57085e4054b03a4ee52179224bc5f337.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/57085e4054b03a4ee52179224bc5f337.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 49.7946%\"></span></span></p>\n<p>Конечно, до прошивки MWOSD в плату minimOSD ее необходимо настроить. Все изменения в файле Config.h<br>\nВ разделе OSD HARDWARE settings:</p>\n<pre class=\"hljs\"><code>#define MINIMOSD \n</code></pre>\n<p>В разделе CONTROLLER SOFTWARE</p>\n<pre class=\"hljs\"><code>#define iNAV\n</code></pre>\n<p>И наконец в разделе AIRCRAFT/INSTALLATION TYPE settings</p>\n<pre class=\"hljs\"><code>#define FIXEDWING\n</code></pre>\n<p>В последних версиях MWOSD есть довольно полезная функция MAPMODE. Если ее активировать в Config.h, то через конфигуратор можно выбрать разные режимы карты. Смысл MAPMODE заключается в том, что центр экрана OSD представляет собой виртуальную карту с меняющимся масштабом, на которой изображен ЛА и дом. Таким образом, можно легко ориентироваться на новой местности.</p>\n<p><strong data-nd-pair-src=\"**\">4. Настройка PIFF</strong><br>\nКак оказалось настройки PID/PIFF которые ставит по-умолчанию Preset являются хорошим стартом для настройки. На скрине ниже приведены коэффициенты для моего 800mm крыла - EPP Rainbow. Так как Duster с миньеном, который есть на фото в начале записи пережил более 100 вылетов, а сделан он был из пенокартона, то он уже давно утилизирован<br>\n<span class=\"image\" style=\"width: 1114px\" data-nd-image-orig=\"http://s8.hostingkartinok.com/uploads/images/2017/02/317e88fbcaee882142291b81260a5e3d.png\"><img src=\"http://s8.hostingkartinok.com/uploads/images/2017/02/317e88fbcaee882142291b81260a5e3d.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 80.6104%\"></span></span></p>\n<p>Я пользовался для настройки PIFF контроллера рекомендации автора - DigitalEntity:<br>\n0) Настраиваем самолет в режиме ANGLE. Полет выполняем визуально, в безветренный день. Начинаем со следующих значений PIFF: P=5, I=10, D/FF = 20</p>\n<ol>\n<li>Даем резкую команду roll с пульта, и смотрим как самолет ее выполняет. Движение самолета должно быть плавным от начала до конца маневра, без осцилляций в начале и в конце, без раскачек. Если самолет раскачивается в конце маневра - уменьшаем FF; Если самолет начинает выполнять маневр быстро, а затем замедляется и снова продолжает движение, как бы рывками - это значит, что FF слишком мало.</li>\n<li>Повторяем то же самое для pitch</li>\n<li>Можно увеличивать FF так, чтобы появились осцилляции в конце маневра, а затем уменьшить этот параметр на 20%</li>\n<li>Если самолет не достигает заданного угла - нужно увеличить коэффициент I</li>\n<li>Чтобы самолет хорошо “боролся” с порывами ветра увеличиваем P, но помним, что увеличение P приводит к более активному использованию серв.</li>\n</ol>\n<p><strong data-nd-pair-src=\"**\">5. Настройка PIDов навигации</strong><br>\nЕсли самолет при возврате домой или полетам по точкам летит совсем не по прямой, а восьмерками и спиралями. То стоит подумать о настройке PID навигации, так как значения по-умолчанию не всегда подходят. Первое, что нужно сделать - установить следующие параметры в CLI и в 90% случаев подобные проблемы уходят</p>\n<pre class=\"hljs\"><code>set nav_fw_pos_xy_p = 50"\n"set nav_fw_pos_xy_i = 5". \n</code></pre>\n<p>Видео полета (на 2.20 включен принудительный RTH)</p>\n<div class=\"ez-player ez-domain-youtube_com ez-block\" data-placeholder=\"<iframe class="ez-player-frame" src="https://www.youtube.com/embed/GYd7mxGxNL8?feature=oembed&amp;autoplay=1" allowfullscreen></iframe>\" data-nd-link-orig=\"https://youtu.be/GYd7mxGxNL8\" data-nd-link-type=\"linkify\">\n <div class=\"ez-player-container\" style=\"padding-bottom: 75%;\">\n <a class=\"ez-player-placeholder\" target=\"_blank\" href=\"https://youtu.be/GYd7mxGxNL8\" rel=\"nofollow\">\n <div class=\"ez-player-picture\" style=\"background-image: url('https://i.ytimg.com/vi/GYd7mxGxNL8/hqdefault.jpg');\"></div>\n \n <div class=\"ez-player-header\">\n <div class=\"ez-player-title\">\n FT Duster under control of iNAV AP on CC3D\n </div>\n </div>\n \n <div class=\"ez-player-button\"></div>\n <div class=\"ez-player-logo\"></div>\n \n </a>\n </div>\n</div>\n","user":"463efb2c3df955007778479b","ts":"2016-02-18T20:22:58.000Z","st":1,"cache":{"comment_count":185,"last_comment":"6011d5cd9970730077130b31","last_comment_hid":185,"last_ts":"2021-01-27T21:06:21.000Z","last_user":"4c7817af3df955007775d178"},"views":75860,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}