Walkera QR-X350 или Arducopter для начинающих
Как я уже писал в теме по этому коптеру, купил его просто на попробовать- сравнить со старой моделью (для простоты буду звать ее неПро). А как оказалось, вместо мексиканского тушкана китайцы подсунули нам шанхайского барса(с).
Не утруждаясь разработками софта китайцы использовали оупенсорсный проект Ардукоптер. Чем это хорошо? Начинающий моделист получает летящий из коробки квадрик уже настроеный производителем. И никакого софта для настройки, четыре полетных режима. В принципе, можно этим ограничиться, для большинства пользователей достаточно. Но это лишь малая часть того, что могут мозги Ардупилот. И грех это не задействовать.
Дискламмер, все делаете на свой страх и риск. За последствия автор ответственности не несет.😉
Опишу, какие полетные режимы можно реализовать:
-Altitude Hold- при среднем положении ручки газа коптер удерживает высоту автоматически, по крену и тангажу как и в нормальном режиме
-Acro Mode- акселерометры практически не участвуют в выравнивании коптера, рулиться как классический вертолет, может делать кувырки
-Auto Mode- автоматически летит по заранее спрограммированной миссии
-Circle Mode- летает круг носом в центр автоматически, пилот управляет только высотой
-Drift Mode- летает как самолет с элеронами, при крене доворачивает по курсу
-Follow Me! Mode- следует за объектом, требуется радиомодем и ЖПС у объекта слежения
-Guided Mode- управляется с наземной станции по радиомодему, по принципу, лети в ту точку на карте, куда я ткнул пальцем или мышью
-Land mode-автоматическая посадка
-Loiter Mode- удержание в точке по ЖПС и барометрическому датчику высоты
-Position Mode-удержание в точке по ЖПС, высота управляется пилотом непосредственным изменением газа на двигателях
-RTL Mode-возвращение в точку дом и автоматическая посадка
-Simple Mode< -по другому курслок
-Super Simple Mode- по другому хоумлок.
-Sport Mode- как и акро, но с удержанием высоты
-Stabilize Mode- выравнивание по акселям в горизонт
Фактически, изначально в Прошке доступны четыре режима полета-
-Stabilize Mode
-Loiter Mode
-RTL Mode
-Simple Mode
Так же в нем по умолчанию отключена полезная функция Geo Fence, виртуальный забор, условно коптер как-бы накрыт большой консервной банкой, размеры которой мы настраиваем, долетев до ее стенок или крышки, он автоматически летит в точку дома.
И отсечка установлена на 10,7В, что не позволяет использовать емкость батареи на полную, это тоже можно изменить.
Для того, чтобы почти все это богатство задействовать нам нужна программа настройки MissionPlanner. Качаем тут.
Шнурок для подключения есть в комплекте коптера.
На сегодня все.
Кто дружен с английским, рекомендую почитать на официальном сайте Ардупилота. Очень все доступно описано, с картинками.
____________________________________________________________________________________________________________________________________________________________
Внимание!
После подключения к МиссионПланнеру не пользоваться визардом и консолью, и не обновлять программное обеспечение, и сразу сделать копию дефолтных настроек.
www.youtube.com/watch?v=iK-1v6wNago
____________________________________________________________________________________________________________________________________________________________
Описываю, как планировать миссию. Коннектимся шнурком к компьютеру(аппаратура включена, батарея в коптере не нужна, он будет питать мозги от ЮСБ порта), открываем МиссионПланнер, выбираем вверху справа нужный порт(где Atmega2560), выбираем скорость 57600, коннектимся, ждем соединения, вилочка на кнопке коннекта позеленеет.
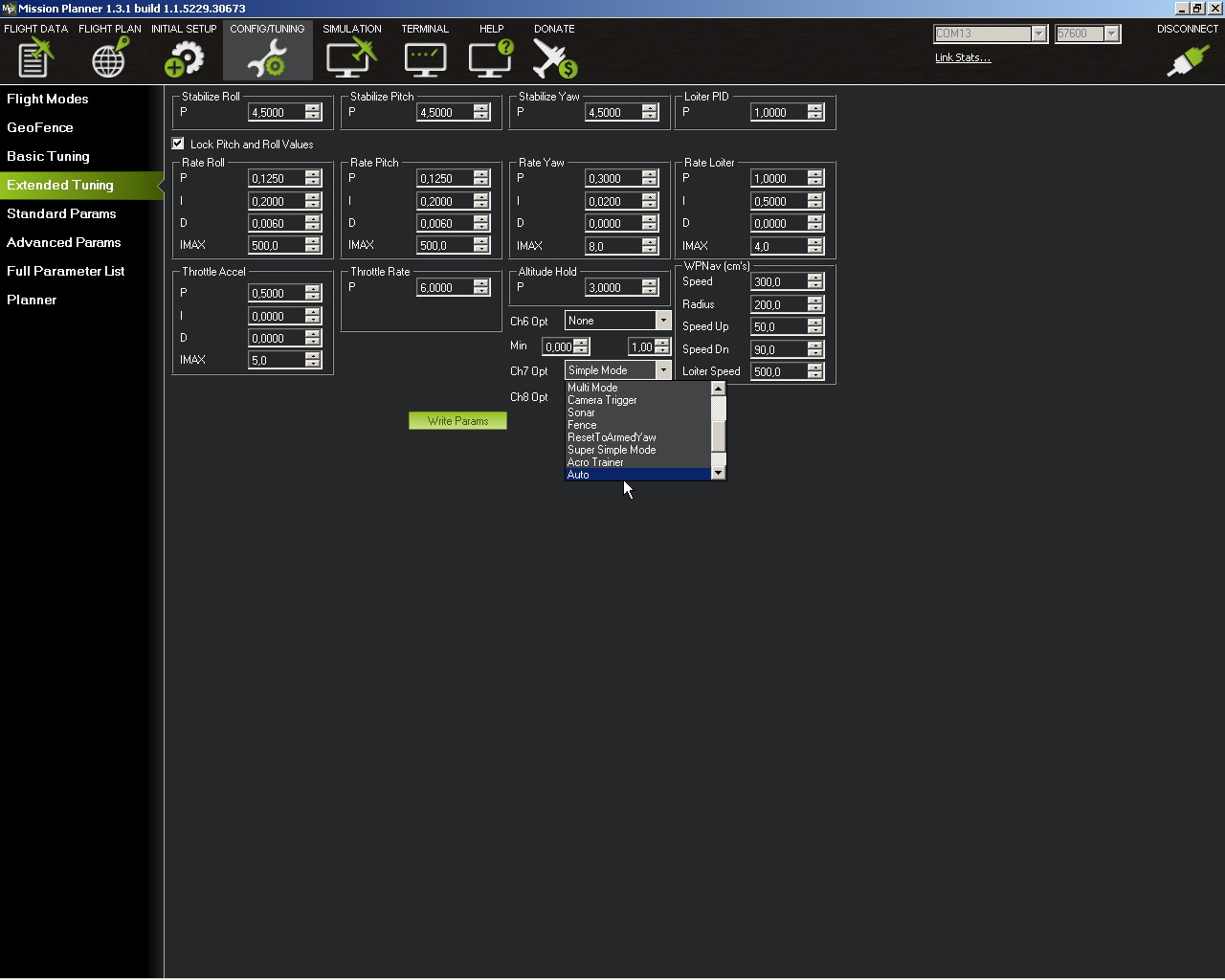
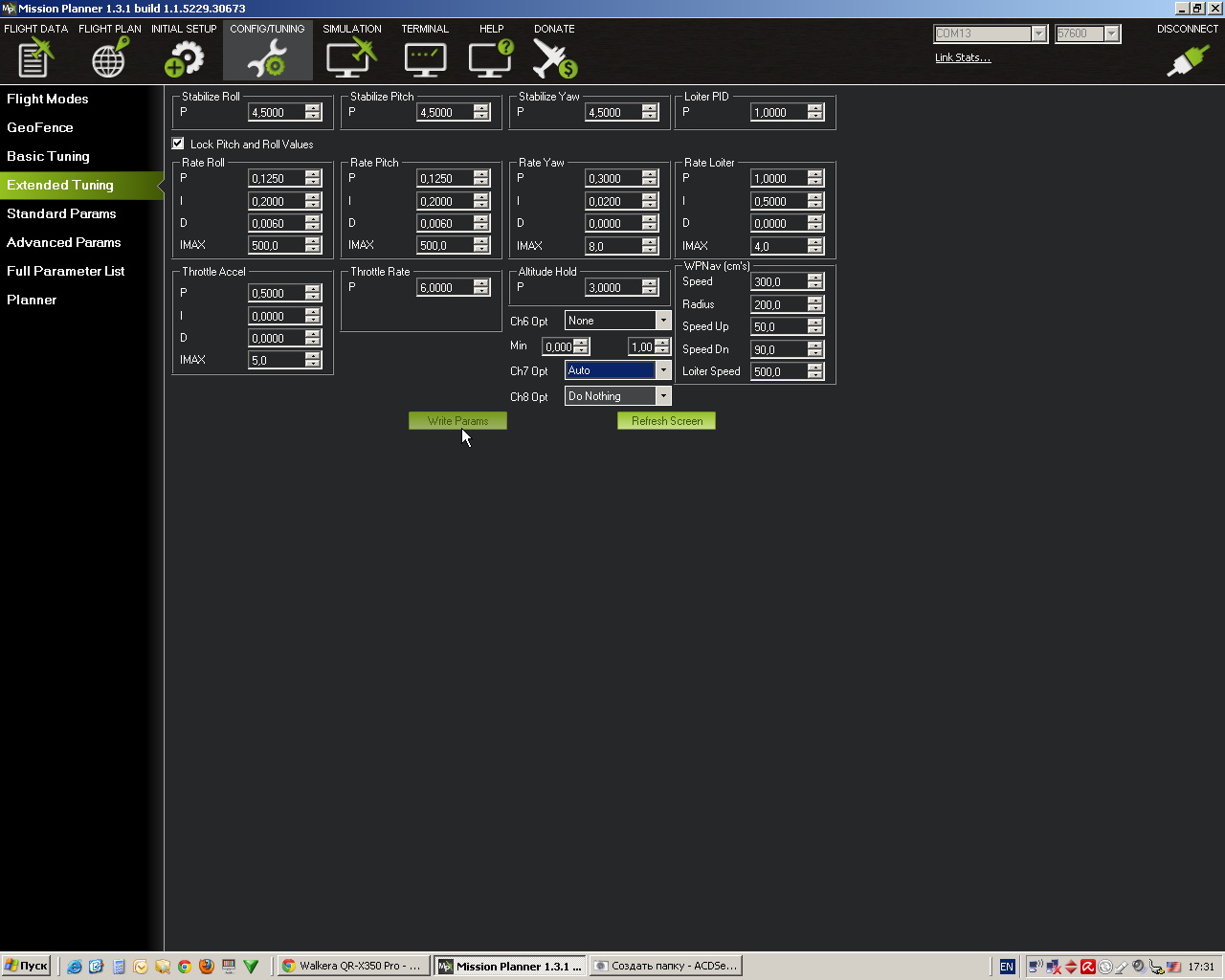
Теперь нужно нам перенастроить тумблер IOC на седьмом канале (этой функцией пожертвуем) на Avto Mode. После переназначения тумблера, нажимаем Write Params для сохранения изменений.
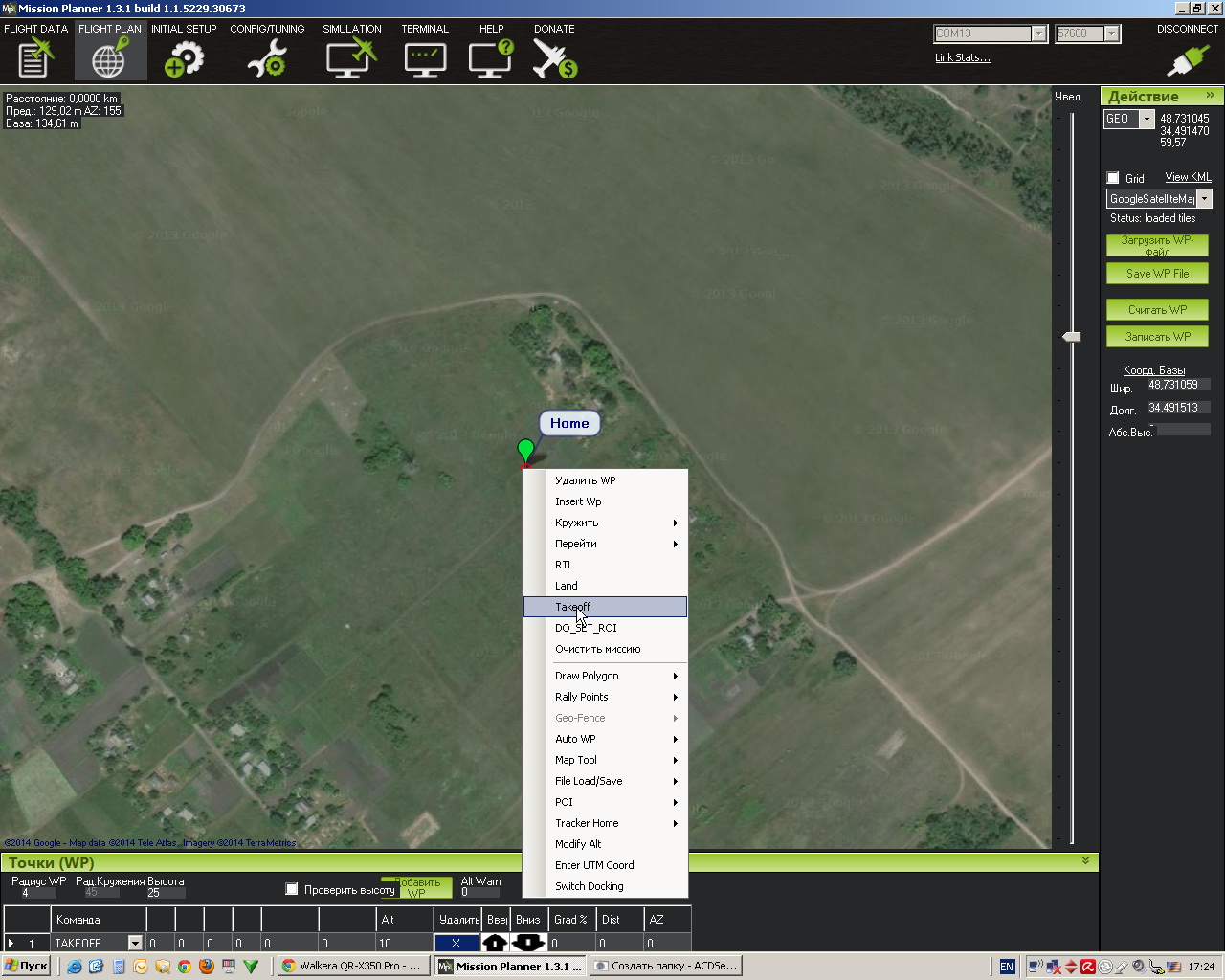
Переходим на закладку планирования миссии, выбираем точку старта, и задаем ее как стартовую Takeoff.
Выбираем в выпавшем окне, на какую высоту подняться после старта.
Расставляем точки маршрута, в примере я выбрал диаметр точки 4 метра и высоту точки 25 метров.

Ставим командную точку возвращения домой RTL.
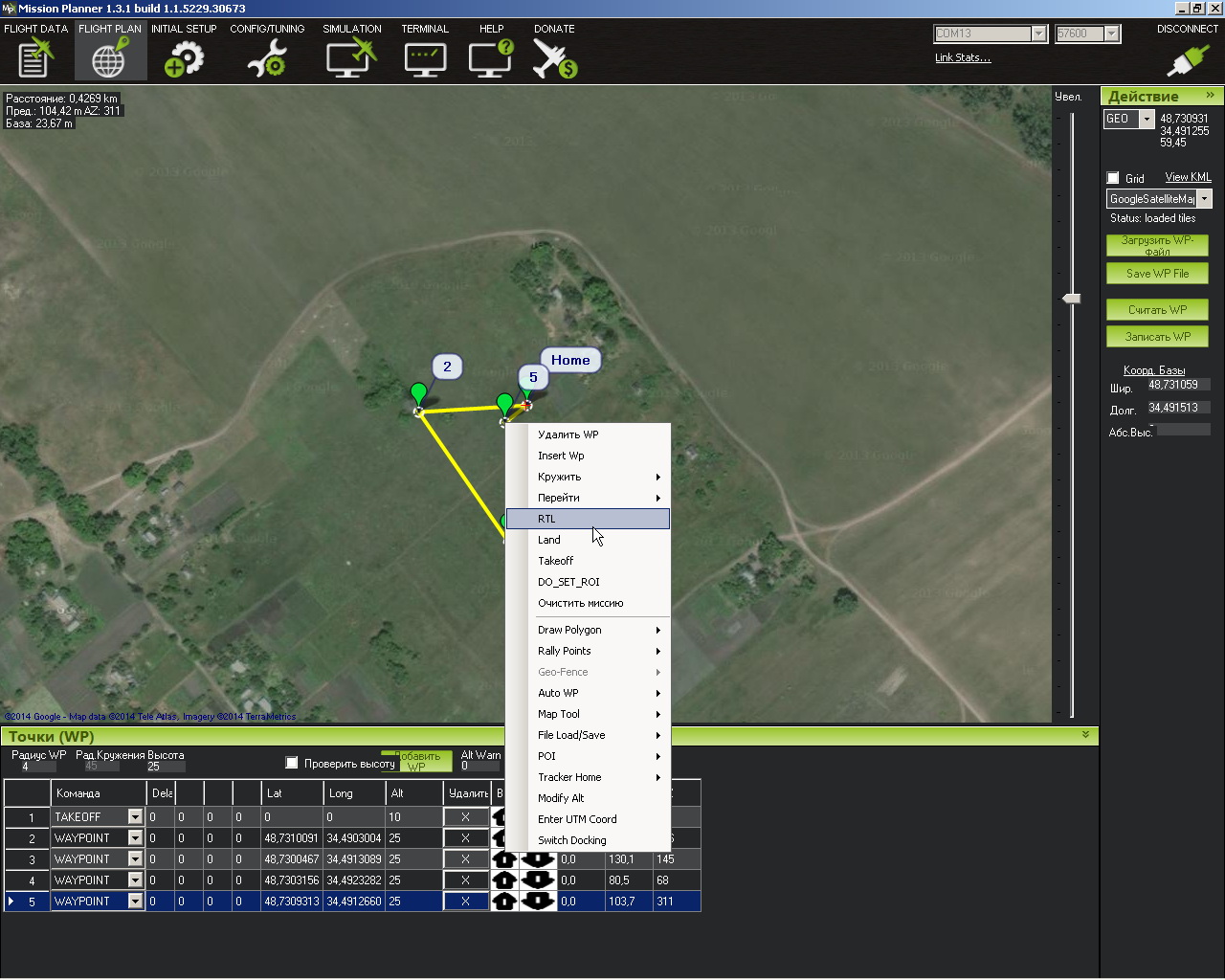
Записываем миссию в полетный контроллер, нажав кнопку “Записать WP”.
Дисконнектимся, нажав вверху справа на кнопку с вилочкой.
Отсоединяем шнурок, выключаем аппаратуру.
Теперь, как летать миссию. Приходим на точку старта, включаем аппу, подсоединяем батарейку к коптеру, и ни в коем случае не разблокируем моторы, пока не получим надежную фиксацию спутников, не менее двух миганий правого светодиода. После чего разблокируем двигатели, переключаем тумблер, тот что был раньше на IOC и поднимаем стик газа до середины. Коптер сам взлетит(его может чуть колбаснуть после отрыва, не страшно), поднимется на заданные 10 метров высоты и пойдет по маршруту. После просадки стик газа вниз и отключить тумблер автомиссии. Заблокировать двигатели. При полете по маршруту, всегда можно вернуть управление, отключив тумблер Avto .
____________________________________________________________________________________________________________________________________________________________________________________________________
По поводу улета коптера, Валкера Про может улететь, если произойдет глюк ЖПС. В Ардупилоте есть настройка защиты, при глюке ЖПС или пропадании сигналов спутников, или забросе трека, можно настроить или автопосадку, или переход в удержание высоты. Ребята из Валкеры решили эту настройку отключить. Так что, меняем в настройке FS_GPS_ENABLE , Disabled на Land и вместо улета, будет автопосадка.

____________________________________________________________________________________________________________________________________________________________
Сравнил полный лист параметров, после перепрошивки Валкеровской 1.1.
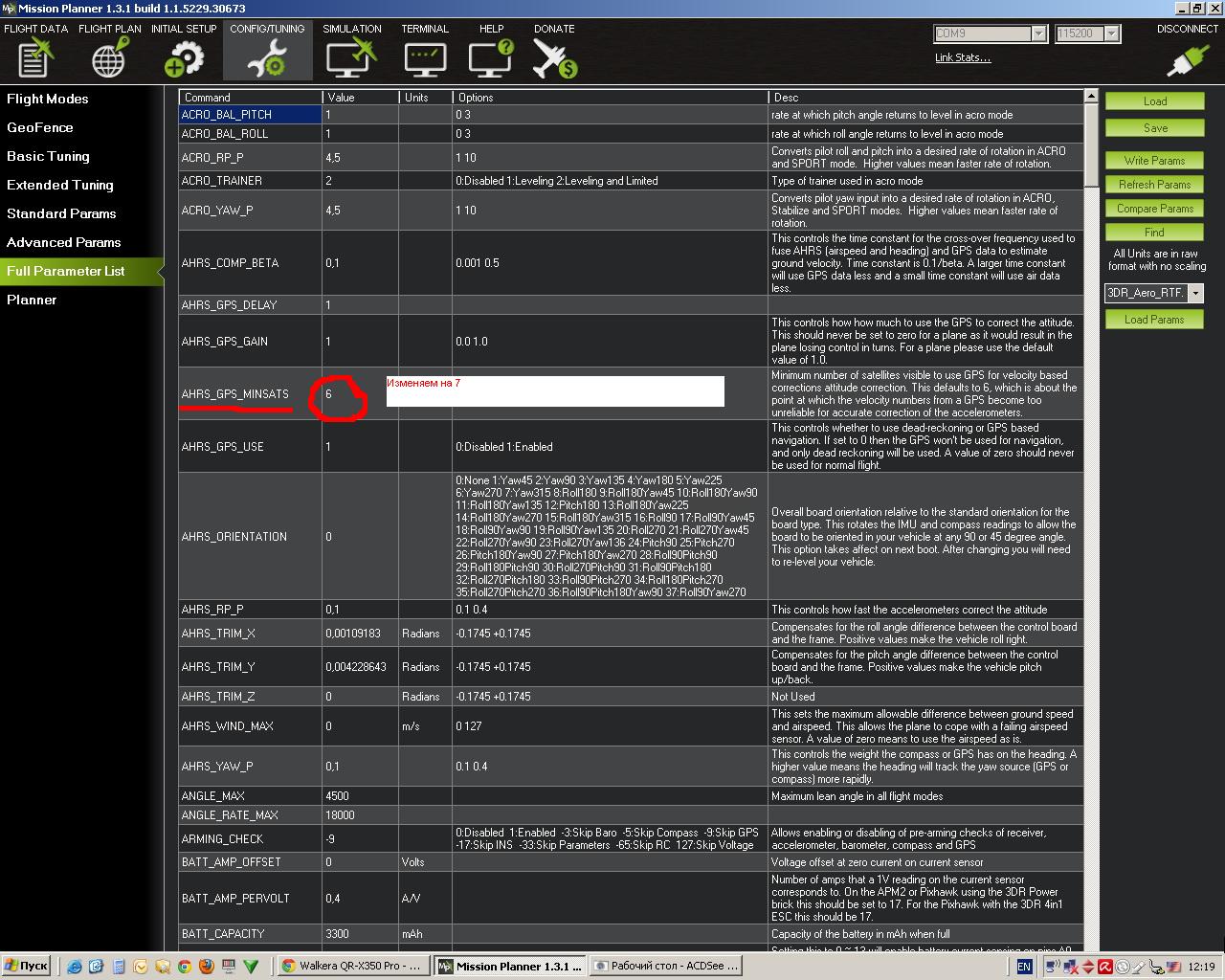
Изменилась всего одна настройка, AHRS_GPS_MINSATS. Было значение 6, стало 7.
Смысл этого параметра в следующем. Автопилот использует скорость GPS для коррекции акселерометра. При малом количестве спутников, точность определения скорости по GPS падает, начинают происходить забросы трека, и чтобы исключить рывки коптера, введен параметр минимального количества спутников, при котором коррекция активна. То бишь, после перепрошивки коррекция будет отключаться, если спутников меньше семи. А раньше отключалась, если меньше шести.
Параметр можно просто поправить в МиссионПланнере и не заморачиваться перепрошивкой через кривой софт от Валкеры, который ещё и драйвер подменяет.
____________________________________________________________________________________________________________________________________________________________
Какие параметры я изменил в Full Parameter List в процессе тюнинга Прошки , и что я этим добился.
WPNAV_SPEED -это скорость, с которой летит коптер при возвращении домой в RTL и во время исполнения миссии. По умолчанию 300см\сек, я установил 900. Теперь коптер домой шустро летит, а не ползет, как финский парень. В принципе, он может и 1500 лететь, но быстро жрет батарейку, да и страшновато со стороны выглядит. ИМХО 900 оптимальная скорость с точки зрения пролетаемых километров по отношению к истраченным амперам.
WPNAV_LOIT_SPEED -это максимальная скорость, с которой летит коптер при полете на нем в режиме Loiter (удержание по GPS). По умолчанию 500, я увеличил до 700.
PILOT_VELZ_MAX - максимальная скороподъемность, которую может задать пилот стиком газа при управлении коптером в режимах, использующих удержание высоты по барометру(Loiter, AltHold, Sport). По умолчанию 250, я поставил 500.
RTL_ALT -высота в см, которую наберет коптер при команде RTL прежде чем полететь домой. По умолчанию 1500 (то бишь 15 метров). Я настроил с учетом, что в местности, где я летаю есть деревья по 25 метров на 3500.
WP_YAW_BEHAVIOR - настройка, определяющая, куда направлен нос коптера при возвращении домой по RTL и при выполнении миссии. По умолчанию 2, я поставил 1 и теперь коптер летит домой развернувшись вперед носом.
И не забыть нажать Write Params после изменения настройки, чтобы она прописалась в контроллере полета.
