Прикупил себе камеру GoPro. Мне нравится, хорошая штука. Планирую использовать ее для FPV полетов. Но пробовал ей снимать и автомодели, так как тоже увлекаюсь этим видом хобби. Особенно мне нравится съемка 60 кадров в секунду, когда потом можно замедлять полученное видео, при этом широкий угол камеры, дает стабильную картинку, но минус в том, что автомодели маленькие по размерам и эффектные кадры получаются только на близком расстоянии. Поэтому, захотел сделать выносной ручной подвес камеры, с помощью которого можно будет снимать красивые ролики прыжков и полетов автомоделей. Суть устройства не нова, на тяге длиной 1,5-2 м, будет закреплен подвес камеры в двух плоскостях X и Z. То есть будут использованы две сервы и система стабилизации. Алгоритм работы видится таким, тяга будет крепиться на руке и в кисте будет что-то типа джойстика с кнопкой. То есть в процессе работы выбирается направление которое нужно стабилизировать, а при нажатии кнопки, две плоскости камеры будут удерживаться при перемещении подвеса в пространстве. То есть при перемещении камеры параллельно летящей модели - камера будет отслеживать полет. Делать подвес уже начал, буду постепенно выкладывать информацию.
Теперь немного о самом подвесе. К сожалению, не имея под рукой возможности использования станков, приходится работать ручками. А это подразумевает использование подручных материалов. Вообщем в качестве несущей трубы будет ручка от швабры 😉, продается в любом хозмаге, прелесть в том, что все алюминиевое, легкое, и к тому же ручка телескопическая, то есть, когда не нужно ее можно укоротить, а когда нужно - удлинить. К тому, же там коненчая часть тоже очень удачная. Теперь немного фото.
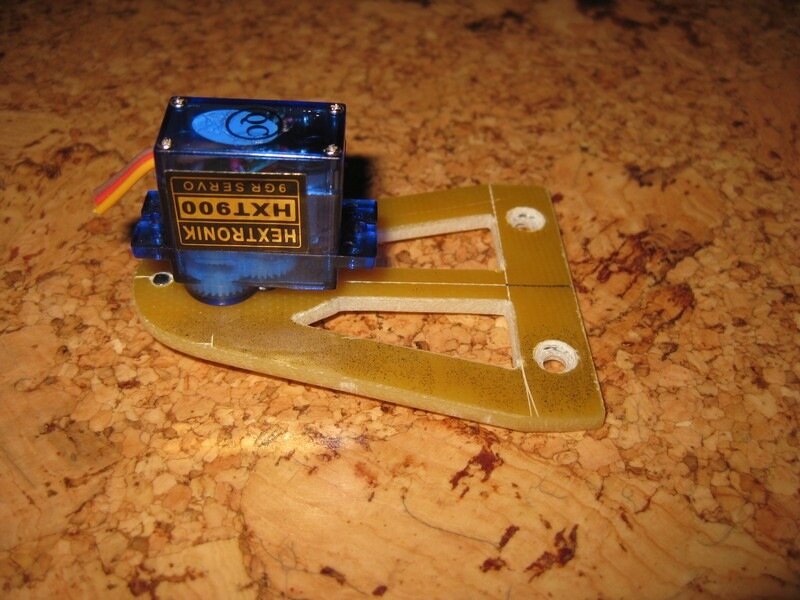
Пока поставил серву DS1015, другой нет, но она тяжеловата, хочу заказать с ХК серву полегче.
Серва будет располагаться вниз головой, на качалке будет висеть рама, на которой будет реализована ось Z. Там хватит сервы поменьше. Сейчас подумал и решил, сделать площадку под камеру, чтобы влезала не только ГоПрошка, но и мыльница у меня есть Canon, там в фотике есть оптический стабилизатор, думаю видео тоже будет получаться не плохое.
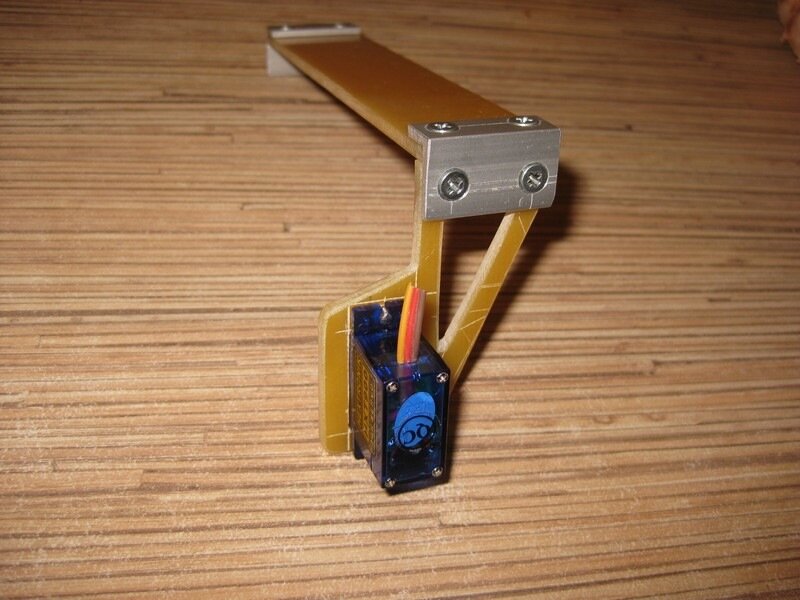
Облегчил вторую стойку подвеса, там где будет серва стоять маленькая.
И так, закончил нижнюю часть подвеса. До облегчения, нижняя часть весило 86 гр., после облегчения - 70гр, это вместе с маленькой сервой. По хорошему, можно сделать еще легче, но немного не все продумал сразу. Выкладываю фотки нижней части, примерил ГоПрошку 😃.
Немного поработал сегодня своим ЧПУ ;D, сделал стойку для крепления маленькой сервы и верхнюю планку, к которой будет крепиться весь подвес к качалке большой сервы.
а потом это дело будет в свободном доступе? или это хлеб и претендовать на халяву не стоит?
Гоупро - обычная или HD? Какое разрешение видео дает?
Кстати стабилизация реально помогает только двух типов: качественным механическим гироскопом (стоит 100500 денег), либо электронная или постобработка. Постобработка для компенсации тряски вообще всегда помогает, но нужен запас по углу зрения и разрешению, чтобы результат был смотрибелен.
Стабилизация при помощи электронной следящей системы - лажа, работает рывками и недостаточно точно, как минимум пост-обработку в конце все равно делать придется.
а потом это дело будет в свободном доступе? или это хлеб и претендовать на халяву не стоит?
Да, конечно, будет в свободном доступе, на хлеб зарабатываю инженером на заводе, это все хобби 😃, в принципе, все просто, буду выкладывать фото, если все заработает, могу снять размеры, без проблем.
Гоупро - обычная или HD? Какое разрешение видео дает?
Кстати стабилизация реально помогает только двух типов: качественным механическим гироскопом (стоит 100500 денег), либо электронная или постобработка. Постобработка для компенсации тряски вообще всегда помогает, но нужен запас по углу зрения и разрешению, чтобы результат был смотрибелен.
Стабилизация при помощи электронной следящей системы - лажа, работает рывками и недостаточно точно, как минимум пост-обработку в конце все равно делать придется.
Камера HD мотоспорт, максимальное разрешение 1080, но 60 кадров в секунду снимает максимум 960. Насчет стабилизации - не думаю что все так сложно! На самолетах и коптерах же подвесы применяются с успехом, тут не думаю, что в чем-то есть разница. Камера не плохо сглаживает тряску.
Вообще по механике не вижу проблем, подвес уже почти сделал. Проблему вижу для себя - это стабилизация. Думаю реализовать все на Ардуинке + WMP +Нунчак. С нунчака хочу задействовать джойстики и кнопки, а с WMP гироскоп. Вот тут придется немного поупражняться, с нунчаком уже разобрался. Так что, вот пока такая концепция высвечивается.
максимальное разрешение 1080, но 60 кадров в секунду снимает максимум 960.
Что-то не впечатлило - с зимы регистратер за 100 баксов купил, он правда 60 не умеет, зато в 30 фпс делает 1280*920 и штатные объектив на 120 градусов (после довольно обширного опробывания в деле - имхо, штатный объектив близок к оптимому, хотя и другие прикручивал - резьба стандартная). На нашем форуме видео выкладывал несколько раз, кстати 😃
На самолетах и коптерах же подвесы применяются с успехом…
С успехом!!! 😃
На самолетах и коптерах стабилизация - более-менее держит сам аппарат на курсе, не убирая никуда тряску. Используется в паре или внутри автопилота, чтобы модель могла сама ориентироваться в пространстве и находить дорогу “домой”; но никак не для плавности съемки!
Все качественные видео с летающих - либо в штиль, либо пост обработка; у остальных - трясучка.
Ну правда был еще один пример вертолета, где камера стабилизирована механическим гироскопом не то за 2, не то за 3 килобакса. Это вертолет еще в воду падать любил 😁
Камера не плохо сглаживает тряску.
Уточни: у неё есть встроенная электронная стабилизация или сглаживание - имеется ввиду, что при угле 180 градусов не очень лезет в глаза?
Это малость очень сильно разные вещи. Но если есть электронная стабилизация (не путать со “стабилизацией” камеры сервами + гироскопами) - хорошо.
PS: если место-масса позволяет - можно сделать эффективную инерционную стабилизацию. Камера на трехосевом подвесе за центр тяжести (чуть выше него) подвешана, с остальной конструкцией связана слабыми амортизаторами (демпферы + пружины), чтобы !неспеша! ориентировалась относительно модели. Пример - только адаптировать конструкцию под установку на модель.
Доделал нижнюю часть подвеса, фото выше. Вес облегченной конструкции с сервой составил 70 гр, до облегчения было 86гр.
С успехом!!! 😃
На самолетах и коптерах стабилизация - более-менее держит сам аппарат на курсе, не убирая никуда тряску. Используется в паре или внутри автопилота, чтобы модель могла сама ориентироваться в пространстве и находить дорогу “домой”; но никак не для плавности съемки!
То есть, вот как на видео ниже, Вы не считаете нормальной стабилизацией видео?
Уточни: у неё есть встроенная электронная стабилизация или сглаживание - имеется ввиду, что при угле 180 градусов не очень лезет в глаза?
Да, не лезет в глаза, только там угол, если не ошибаюсь 127 градусов, к сожалению никакой стабилизации в ГоПрошке нет, да и не особо она нужна там за свои деньги.
Пример
Да такие конструкции встречал, но он заточен именно на руку, в моем случае подвес надо будет выносить на штанге, да и вес подвеса как в примере будет очень большой.
Цель моего подвеса не максимально стабильная картинка, к этому тоже надо стремиться, а чтобы максимально долго движущаяся модель находилась в близком расстоянии от камеры, вот пожалуй и все. Все остальное конечно будет делаться видео монтажем. Вот тут мое видео, пробовал снимать ГоПро и потом замедлять видео, там начиная с 1-й минуты есть прыжки, снято было с руки, пытался отслеживать модель, но расстояние было около 2-х метров до модели. Вот такой эффект, только еще для более ближней съемки я хочу получить.
Немного поработал сегодня своим ЧПУ ;D, сделал стойку для крепления маленькой сервы и верхнюю планку, к которой будет крепиться весь подвес к качалке большой сервы. Добавил фото.
Вообщем, доделал механику подвеса, получается прикольно, попробую подключить к приемнику и подвигать подвесом с пульта:
И так, наконец-то приехал мне нунчак и WMP, праздники сделали свое дело, шла посылка больше месяца. Также раньше был куплен контроллер Arduino mini Pro. Посидел несколько вечеров, поковырялся, и понял, что есть проблемка, не могу связать нунчак и ардуино. До этого усиленно юзал тему про MultiWii в коптерной теме. Вроде все просто, но в тоже время и не все понятно. В сети нашел множество проектов подключения нунчака для управления сервой, что в принципе мне и нужно. Вот например тут www.windmeadow.com/node/42 . Но у меня данный код не заработал, тупо скапировал и попытался залить в ардуино, выскочило пару ошибок, исправил их. Суть в другом. В мониторе вижу, что Ардуинка пытается общаться с нунчаком, но все данные с нунчака с акселерометра и с джойстика идут в виде чисел 255 и 1-чек для двух кнопок. Такое впечатление, что все-таки не работает нунчак или слишком большая скорость для клона нунчака. Поэтому прошу помощи, кто может посмотреть и подправить код, где ошибка. И еще в MultiWii есть такое понятие в коде, как уменьшение скорости передачи в шине I2C, как в моем случае можно уменьшить скорость? Вот код для подключения нунчака к ардуино из ссылки выше, буду очень признателен в помощи:
#include <Wire.h>
#include <string.h>
#undef int
#include <stdio.h>
uint8_t outbuf[6]; // array to store arduino output
int cnt = 0;
int ledPin = 13;
void
setup ()
{
beginSerial (19200);
Serial.print (“Finished setup\n”);
Wire.begin (); // join i2c bus with address 0x52
nunchuck_init (); // send the initilization handshake
}
void
loop ()
{
Wire.requestFrom (0x52, 6); // request data from nunchuck
while (Wire.available ())
{
outbuf[cnt] = nunchuk_decode_byte (Wire.receive ()); // receive byte as an integer
digitalWrite (ledPin, HIGH); // sets the LED on
cnt++;
}
// If we recieved the 6 bytes, then go print them
if (cnt >= 5)
{
print ();
}
cnt = 0;
send_zero (); // send the request for next bytes
delay (100);
}
// Print the input data we have recieved
// accel data is 10 bits long
// so we read 8 bits, then we have to add
// on the last 2 bits. That is why I
// multiply them by 2 * 2
void
print ()
{
int joy_x_axis = outbuf[0];
int joy_y_axis = outbuf[1];
int accel_x_axis = outbuf[2] * 2 * 2;
int accel_y_axis = outbuf[3] * 2 * 2;
int accel_z_axis = outbuf[4] * 2 * 2;
int z_button = 0;
int c_button = 0;
// byte outbuf[5] contains bits for z and c buttons
// it also contains the least significant bits for the accelerometer data
// so we have to check each bit of byte outbuf[5]
if ((outbuf[5] >> 0) & 1)
{
z_button = 1;
}
if ((outbuf[5] >> 1) & 1)
{
c_button = 1;
}
// Encode data to format that most wiimote drivers except
// only needed if you use one of the regular wiimote drivers
char
nunchuk_decode_byte (char x)
{
x = (x ^ 0x17) + 0x17;
return x;
}
Там по ссылке еще человек тоже что-то говорит про изменение скорости и есть вот такая часть кода :
#define ATMEGA8
Это и есть изменение скорости шины I2C, это нужно вставить в начало основного кода? Да забыл указать, что нунчак питаю +5В, может быть в этом проблема и нужно подать +3.3В? Вроде как для MultiWii, народ не заморачивается и летает на 5 В.
И так, хочешь что-то сделать хорошо, сделай это сам 😃 ! Вообщем поиск рулит. Научился дружить нунчак с сервой, теперь буду править код под свои задачи!
Проект закрыт! Снял вот этот ролик камерой ГоПро просто привязанной к палке, лучше человеческой руки нет стабилизатора 😁. Да и момент там есть, когда модель прилетела в камеру, думаю подвес бы не выжил при таком столкновении, а тут только тяга на модели сломалась.
Многие скажут зря потратил время! Не так, опыт бесценен, получил навыки в работе с Ардуиной, уже хорошо. Пригодиться в других проектах. К тому же подвес может пригодиться на гексе! Собираю NAZA на раме F550, но это уже совсем другая история…
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"3ff69d1e3df95500777955a3":{"_id":"3ff69d1e3df95500777955a3","hid":2659,"name":"ADF","nick":"ADF","avatar_id":null,"css":""},"492b64673df95500777752b2":{"_id":"492b64673df95500777752b2","hid":41104,"name":"drozd79","nick":"drozd79","avatar_id":null,"css":""},"4968a5a83df95500777737ba":{"_id":"4968a5a83df95500777737ba","hid":42644,"name":"RuslanG","nick":"RuslanG","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"4ec64c159970730077104f17","hid":12996,"title":"Ручной подвес камеры GoPro для съемок автомоделей.","html":"<p>Прикупил себе камеру GoPro. Мне нравится, хорошая штука. Планирую использовать ее для FPV полетов. Но пробовал ей снимать и автомодели, так как тоже увлекаюсь этим видом хобби. Особенно мне нравится съемка 60 кадров в секунду, когда потом можно замедлять полученное видео, при этом широкий угол камеры, дает стабильную картинку, но минус в том, что автомодели маленькие по размерам и эффектные кадры получаются только на близком расстоянии. Поэтому, захотел сделать выносной ручной подвес камеры, с помощью которого можно будет снимать красивые ролики прыжков и полетов автомоделей. Суть устройства не нова, на тяге длиной 1,5-2 м, будет закреплен подвес камеры в двух плоскостях X и Z. То есть будут использованы две сервы и система стабилизации. Алгоритм работы видится таким, тяга будет крепиться на руке и в кисте будет что-то типа джойстика с кнопкой. То есть в процессе работы выбирается направление которое нужно стабилизировать, а при нажатии кнопки, две плоскости камеры будут удерживаться при перемещении подвеса в пространстве. То есть при перемещении камеры параллельно летящей модели - камера будет отслеживать полет. Делать подвес уже начал, буду постепенно выкладывать информацию.</p>\n<!--cut-->\n<p>Теперь немного о самом подвесе. К сожалению, не имея под рукой возможности использования станков, приходится работать ручками. А это подразумевает использование подручных материалов. Вообщем в качестве несущей трубы будет ручка от швабры <span class=\"emoji emoji-wink\" data-nd-emoji-src=\":wink:\">😉</span>, продается в любом хозмаге, прелесть в том, что все алюминиевое, легкое, и к тому же ручка телескопическая, то есть, когда не нужно ее можно укоротить, а когда нужно - удлинить. К тому, же там коненчая часть тоже очень удачная. Теперь немного фото.</p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5821/17616515.0/0_768a6_98a14e52_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5821/17616515.0/0_768a6_98a14e52_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5821/17616515.0/0_768a6_98a14e52_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5821/17616515.0/0_768a6_98a14e52_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5312/17616515.0/0_768a7_1f665d3e_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5312/17616515.0/0_768a7_1f665d3e_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5312/17616515.0/0_768a7_1f665d3e_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5312/17616515.0/0_768a7_1f665d3e_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5818/17616515.0/0_768a9_ae04f193_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5818/17616515.0/0_768a9_ae04f193_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5818/17616515.0/0_768a9_ae04f193_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5818/17616515.0/0_768a9_ae04f193_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p>Пока поставил серву DS1015, другой нет, но она тяжеловата, хочу заказать с ХК серву полегче.<br>\n<a href=\"http://img-fotki.yandex.ru/get/4713/17616515.0/0_768aa_f103e9d3_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/4713/17616515.0/0_768aa_f103e9d3_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/4713/17616515.0/0_768aa_f103e9d3_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/4713/17616515.0/0_768aa_f103e9d3_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/4418/17616515.0/0_768ab_6129ffd4_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/4418/17616515.0/0_768ab_6129ffd4_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/4418/17616515.0/0_768ab_6129ffd4_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/4418/17616515.0/0_768ab_6129ffd4_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p>Серва будет располагаться вниз головой, на качалке будет висеть рама, на которой будет реализована ось Z. Там хватит сервы поменьше. Сейчас подумал и решил, сделать площадку под камеру, чтобы влезала не только ГоПрошка, но и мыльница у меня есть Canon, там в фотике есть оптический стабилизатор, думаю видео тоже будет получаться не плохое.</p>\n<p><a href=\"http://img-fotki.yandex.ru/get/4525/17616515.0/0_768d1_b6602573_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/4525/17616515.0/0_768d1_b6602573_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/4525/17616515.0/0_768d1_b6602573_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/4525/17616515.0/0_768d1_b6602573_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5312/17616515.0/0_768d2_c050caaf_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5312/17616515.0/0_768d2_c050caaf_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5312/17616515.0/0_768d2_c050caaf_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5312/17616515.0/0_768d2_c050caaf_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p>Облегчил вторую стойку подвеса, там где будет серва стоять маленькая.<br>\nИ так, закончил нижнюю часть подвеса. До облегчения, нижняя часть весило 86 гр., после облегчения - 70гр, это вместе с маленькой сервой. По хорошему, можно сделать еще легче, но немного не все продумал сразу. Выкладываю фотки нижней части, примерил ГоПрошку <span class=\"emoji emoji-smiley\" data-nd-emoji-src=\":smiley:\">😃</span>.</p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5820/17616515.0/0_768d9_2159c906_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5820/17616515.0/0_768d9_2159c906_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5820/17616515.0/0_768d9_2159c906_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5820/17616515.0/0_768d9_2159c906_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5413/17616515.0/0_768da_fd79962a_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5413/17616515.0/0_768da_fd79962a_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5413/17616515.0/0_768da_fd79962a_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5413/17616515.0/0_768da_fd79962a_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/4712/17616515.0/0_768db_365c8a5_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/4712/17616515.0/0_768db_365c8a5_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/4712/17616515.0/0_768db_365c8a5_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/4712/17616515.0/0_768db_365c8a5_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/4712/17616515.0/0_768dc_ffe92f8c_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/4712/17616515.0/0_768dc_ffe92f8c_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/4712/17616515.0/0_768dc_ffe92f8c_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/4712/17616515.0/0_768dc_ffe92f8c_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p>Немного поработал сегодня своим ЧПУ ;D, сделал стойку для крепления маленькой сервы и верхнюю планку, к которой будет крепиться весь подвес к качалке большой сервы.</p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5313/17616515.1/0_775c8_1199e98_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5313/17616515.1/0_775c8_1199e98_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5313/17616515.1/0_775c8_1199e98_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5313/17616515.1/0_775c8_1199e98_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5820/17616515.1/0_775ca_2af52f34_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5820/17616515.1/0_775ca_2af52f34_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5820/17616515.1/0_775ca_2af52f34_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5820/17616515.1/0_775ca_2af52f34_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/4714/17616515.1/0_775cb_8002f48c_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/4714/17616515.1/0_775cb_8002f48c_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/4714/17616515.1/0_775cb_8002f48c_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/4714/17616515.1/0_775cb_8002f48c_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/4418/17616515.1/0_775cc_608acbef_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/4418/17616515.1/0_775cc_608acbef_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/4418/17616515.1/0_775cc_608acbef_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/4418/17616515.1/0_775cc_608acbef_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5313/17616515.1/0_775ce_9aedbc2e_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5313/17616515.1/0_775ce_9aedbc2e_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5313/17616515.1/0_775ce_9aedbc2e_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5313/17616515.1/0_775ce_9aedbc2e_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n<p><a href=\"http://img-fotki.yandex.ru/get/5821/17616515.1/0_775d0_ff38978a_XL.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://img-fotki.yandex.ru/get/5821/17616515.1/0_775d0_ff38978a_XL.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"https://img-fotki.yandex.ru/get/5821/17616515.1/0_775d0_ff38978a_M.jpg\"><img src=\"https://img-fotki.yandex.ru/get/5821/17616515.1/0_775d0_ff38978a_M.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></a></p>\n","user":"492b64673df95500777752b2","ts":"2011-11-18T12:14:13.000Z","st":1,"cache":{"comment_count":11,"last_comment":"501780fd997073007715cf8c","last_comment_hid":11,"last_ts":"2012-07-31T06:53:49.000Z","last_user":"492b64673df95500777752b2"},"views":3518,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}