MultiWii

Друзья, помогите советом, пожалуйста!
Нашел в закромах плату Crius AIO v1.1 с прошивкой MultiWii 2.1
Потратил уже 3 дна на чтение форумов и описаний.
Не могу залить в нее ничего нового.
Пробовал:
- MegaPirateNG все версии но выводит ошибку внутри кода (ставлю X copter и Crius AIO)
- MultiWii_2_3 выдает ошибку таймаута
- Пробовал FlashTool - опять time out
плату брал тут goodluckbuy.com/dji-f450-multicopter-quadcopter-co…
голову поломал, срабатывает только на Mw-WinGUI-2.1.
У нее что, защита от записи ?
Загрузчик в контроллере нужно заменить. Ищи ответ в ветке мегапирата… Читай тут например и где-то дальше еще.
Благодарю, но как послал. Его другим программатором шить ?
С помощью программатора usbaps через разъем ISP ( есть на плате) из arduino_ide / Там есть загрузчик ,который у меня заливается без проблем( проц. надо выбрать свой)
А потом прошивку через юсб.
2.1 в гуи нормально отрабатывает?
В GUI 2.1 отрабатывает, но уж больно она страшненькая.
ГУРУ подскажите MultiWii PRO 2.0 Flight Controller
…gostorego.com/…/multiwii-pro-2-0-flight-controlle…
с цифровыми сервами BMS-375DMG на стабилизации камеры будет хорошо ладить??
прикрутил Turnigy TG9e 9g еще летать не начал они задергались, по началу было всё хорошо а пока настраивал, пробовал, вылезло дрожание. Причем нет закономерности может пропадать может появляться контакты, соединения, питание проверил всё ОК проблема свелась к сервам. Получается надо менять
летать не начал они задергались,
Думаю мультивий тут не причем, это сервы. Если программируются, попробуйте дидбанд увеличить. Тэма частенько поднимается. Да и у самого такая проблема была
.
Можно посмотреть ещё жесткость тяг или попробовать слегка демпфировать шарниры подвеса.
Не в тему, конечно. Прошу извинить. У меня при падении ломались редукторы серв. Обычно от одной до трёх штук. Довольно накладно получалось. Купил Tarot.
доброго времени суток
собрал коптер на базе
рама х450
регулятор turnigy esc 30a
мотор SunnySky x2212 kv980
мозги Multiwii 2.5
при армэ все моторы запускаются одновременно но через 30 секунды передне правый (front left)и задне левый (rear right)скорость падает
не могу понять от чего это
Прошу помочь
потому что это не коптер в воздухе, с обратной связью, а плата, которая не знает ничего о том, что ее окружает
сколько раз говорили - НЕ СМОТРИТЕ НА КОМАНДЫ УПРАВЛЕНИЯ БЕЗ ПРОПЕЛЛЕРОВ
корректно будет показывать только тогда, когда будет висеть.
блин почти через страницу одно и то же
Блин, какая-то ерунда началась…
Глючит измерение напряжение на nanowii MW2.3:
Припаял резисторы делителя, настройил в ГУИ Voltage Scale. Поставил три пороговых значения напряжени 7,1 6,9 и 6,8
Протестировал - всё ок, один писк, потом по два писка и по три соответственно при разряде.
Вчера проверяю - начало пищать по одному писку (первый порог). Сажусь - пищать не перестаёт (обычно при посадке, когда нагрузка пропадает - напряжение вверх подпрыгивает существенно). Проверяю тестером - так и есть, напряжение показывает 7,4, при пороге 7,1. А он пищит непереставая.
Выдёргиваю батарею - вставляю. Молчит…
Начинаю летать - опять попискивает, сажусь - писк пропадает. Ну думаю глюк прошёл.
Долётываю аккум, а он как начинает по одному писку пищать, так и продолжает, не переходит на серии из 2=х и 3=х писков, в итоге аккум разрядил вноль считай, до 6 В 😦 а он так и продолжает пищать по первому порогу…
Что за ерунда?
В Гуи показывает провильное напряжение
Сам же себе отвечаю:
Обнуляйте EEPROM каждый раз когда меняете VBATTSCALE
десять страниц назад писали об этом
Сообщение от STRIMSS
Вот менял от 10 до 1000, вообще ни на что не влияет. в гуи врет на 0.6-0.7В
тфу блин голова пустая…
а ЕЕПРОМ то чистили после смены? т.к. это значение на чистую берется всего 1 раз, а потом из еепром уже…
все было под пластом страниц
десять страниц назад писали об этом
И три страницы назад тоже. rcopen.com/forum/f123/topic221574/11767
ну я на самом деле не ожидал что будет именно так глючить, т.е. то видит то значение которое установили через конфигуратор, то вдруг спонтанно “вспоминает” значение записанное в еепром и начинает его считать главным, а потом опять возвращается к значению конфигуратора.
Новогодние скидки!
rcopen.com/blogs/83206/17033
продлил до 15-го…
Подскажите други! Собрал трикоптер, залил мултиви 2.3
плата хоббикин AIO
такая - Multiwii_and_Megapirate_AIO_Flight_Controller_w_FTDI_ATmega_2560_V2_0
моторы подключены на 3,5,6 серва на 11…
после 5 минут работы на полу без пропеллеров перестал работать мотор на 5м выходе… перекинул моторы местами - таже песня… т.е. сдох 5й канал.
можно как-то в прошивке перенеcти мотор 5-го канала на другой живой?
ПС - так это на полу выглядит)
и еще вопрос - во всех описаниях - серва цепляется на 2й выход… а у меня она работает ТОЛЬКО на 11. и в прошивке она на 11м … как таК?
Привет. Валяется у меня платка нерабочая nanowii, кое-где нет кондеров и несколько дорожек отлетело хотелось бы восстановить, реально ли найти схемку?
Не оно? -
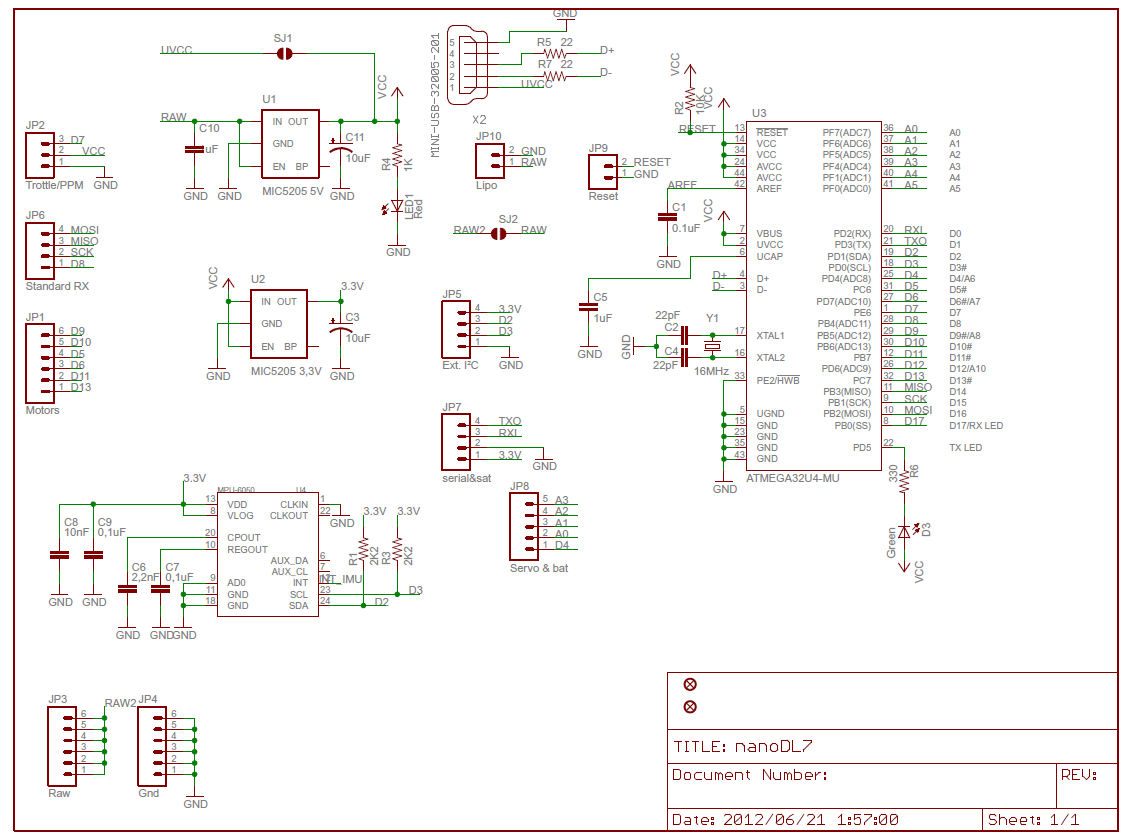
крупнее - 4put.ru/pictures/max/1056/3244839.jpg
Или нужна именно монтажка?
А так - продаю один, если что! ))
Спасибо. А что, даже монтажка есть?