MultiWii

ставить как и оригинальную FFIMU 1.22L разЪёмами назад …
вовсяком случае на пирате и ранних Wii так … последние сборки Wii непробовал …
а ваапче код можно под любой вариант установки поправить …
ставить как и оригинальную FFIMU 1.22L разЪёмами назад …
вовсяком случае на пирате и ранних Wii так … последние сборки Wii непробовал …
а ваапче код можно под любой вариант установки поправить …
очень странно )
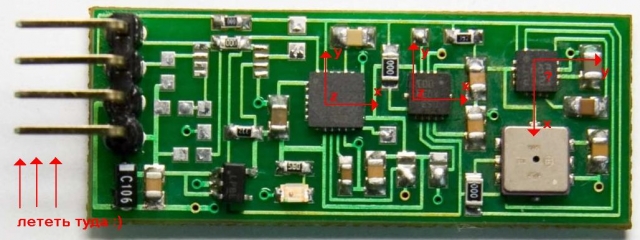
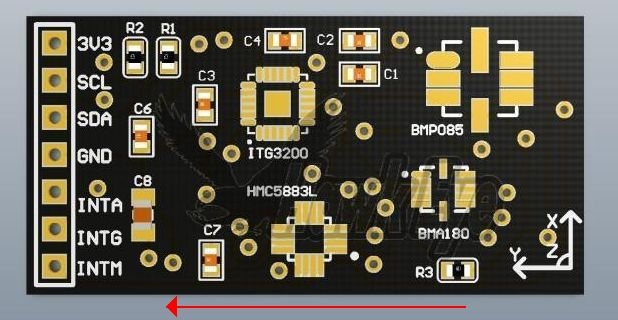
по даташиту микросхема компаса установлена не правильно (ее требуется развернуть на 90 градусов против часовой стрелки), а микрухи акселя с гирами расположены таким образом, что разъем у платы должен быть слева
вы летали вообще на данной схеме, точнее проверяли ее без вмешательства в код программы?
нет, я не собираюсь опровергнуть работоспособность данного изделия, но все же привык доверять даташиту производителя…
вы какой тип платы датчиков выбрали ???
если алливан то оно работать небудет … там чипы (оси) подругому взаиморасположены …
если просто выбрали чипы датчиков то нужно смотреть по графикам чтобы колебания совпадали с перемещением платы , возможно придется править код (менять местами/инвертировать оси на какихто датчиках) …
плата делеласЪ из проекта FFIMU 1.22 с сохранением ориентации чипов , поскольку на тот момент FFIMU 1.22 активно продавалась и поддерживаласЪ всеми популярными проектами … для этого в проекте достаточно раскоментировать соответствующий дефайн …
также взаимная ориентация чипов совпадает с проектом аэроквад …
ща перепроверил ориентацию с тем что было готового в ноуте …
в мегапирате старом (В8) на котором тестирую платы , разЪемами взад , поэтому и написал так попамяти … в Мультивиае 1,8 при выборе FFIMUv2 действительно боком как на картинке …
значит разработчики FFIMU накасячили с ориентацией чипов, а вы подхватили ее, ну и мультивии, мегапират решили не запариваться, прописали как есть 😃
последующие разработки все с правильной ориентацией идут
Поставил как раз так же, но чё то с этой платой коптер начало закручивать по yaw, вот и думаю может не так всё таки ставить нужно?
попробуйте в конфиге не выбирать FFIMU, а каждый датчик по отдельности расскоментируйте, кроме компаса
ну у аэроквада тогда тоже накосячили с ориентацией компаса …
вообще обозначение осей весьма условно … просто я брал за основу самую ходовую на тот момент плату …
вообще есть идея слелать плату 50х50 сразу с 328 мегой под максимально возможное количество разных датчиков , втомчисле аналоговых и с возможностью установки вместо кварца внешнего генератора (для оверклокинга меги) …
получится плата под виайнай код , заодно заготовка под разработку двухядерного проекта на AVR …
лучше сделайте платку под бюджетные датчики которые можно переставить с чаков и виимоушин
с условием одностороннего монтажа и одностороннего текстолита
думаю будет пользоваться огромным успехом так как все детали идут в комплекте (кроме меги и ее обвязки соответственно, которую так же можно взять с ARDUINO Pro Mini), плюс никаких заморочек с металлизацией отверстий, дешевизна, присутствие автоуровня, а все остальные датчики нафик не нужны
данный комплект и создание контроллера обойдется примерно 1300 рублей, а то и меньше, но это будет то что доктор прописал )
и не надо отписываться про галимость этих датчиков, у меня коптер летает/зависает на 5 с плюсом
на вимоушен обычно стоят 3205 изза которого плату похорошему нужно делать по 4 классу …
на чаках аналоговые датчики которые сЪедают 3 ноги АЦП на меге что тоже негуд …
если делать одностороннюю плату то слишком дохрена перемычек будет … нужен какминимум земляной полигон на обороте …а это по цене выходит тоже что и двухсторонняя … ставить этажеркой промини невижу смысла , проще мегу с кварцем припаять …
такчто делать просто монтажку и шилд с датчиками под промини точно небуду …
если буду делать как задумал , то датчики с моушенов (3205) точно можно будет ставить … может даже разведу под 500/650-е инвенсенсы , но тогда точно придется суммарный сигнал с приемника подавать … аксели точно будут бошевские ,АДшки и аналоговые (разные) с чаков … компасы только 5883 , бары 085 и 5611 … те напаивать можно будет то что есть в наличии … также если влезет можно сразу FT232RL поставить и/или на обратной стороне предусмотреть блютузный модуль …
дальше если вместо кварца поставить генератор на 24 мгц ато и на все 32 (новые меги по имеющейся информации гонятся до 40 с лишним) то получим существенный прирост в скорости обработки данных с датчиков …
дальше подпаиваемся на выводы SPI меги и цепляемся к 2560 ардуине , которая уже рулит моторами и прочим , таким образом еще сильнее разгружаем мелкую мегу …
зачем ft323rl на основной плате не понял. удобнее отдельным модулем имхо.
место под блютуз - мне нравится идея.
про две меги - кто будет код писать и поддерживать актуальную ветку?
про двусторонние платы согласен. если заказывать на заводе то односторонние смысла нет.
sulaex, по 50 баксов готовые решения на ебай есть. тут уже выиграть не получится.
ну ft323rl можно просто не припаивать , а использовать отдельный модуль … это первое что будет убираться если небудет помещаться на плате …
а вот с этим goodluckbuy.com/mwc-multiwii-se-standard-edition-4… ты уже не сможешь конкурировать 😃
даже не могу придумать что теперь еще для щастия надо
причем на ГЛ дешевле чем не ибее 😃
www.ebay.com/itm/…/250942208609
и доставка фри
молодцы китайцы!
лучше сделайте платку под бюджетные датчики которые можно переставить с чаков и виимоушин
с условием одностороннего монтажа и одностороннего текстолита
Кстати вполне реально сделать именно так.Плюс не понимаю почему все вцепились именно в такой набор датчиков?
Теоретически можно подцепить почти любые со сходными характеристиками.
Лично преспокойно юзаю ДУС L3G4200D и акселерометр LIS3DH за (250р и 80р за чип).
Можно подцепить LSM303D… акселерометро-компас (250р за чип)
Я даже где-то здесь выкладывал такую печатную плату где все сделано на 1-стороне.
на вимоушен обычно стоят 3205 изза которого плату похорошему нужно делать по 4 классу …
на чаках аналоговые датчики которые сЪедают 3 ноги АЦП на меге что тоже негуд …
если делать одностороннюю плату то слишком дохрена перемычек будет … нужен какминимум земляной полигон на обороте …а это по цене выходит тоже что и двухсторонняя … ставить этажеркой промини невижу смысла , проще мегу с кварцем припаять …
такчто делать просто монтажку и шилд с датчиками под промини точно небуду …
какой такой павлин мавлин?
говорю же, нафик остальные датчики нужны, нафик тогда и дополнительные как бы занятые акселем ноги? соответственно и односторонний монтаж не сложен, перемычек от силы пять штук наберется, посему и проще изготовление.
ардуину я имел ввиду в качестве донара использовать а не паять этажерку
смысл в том что платка выйдет очень бюджетной, и не вижу смысла в барометре с компасом, от них толку мало, так же болтает как и без них.
на счет 1300 рублей я загнул, выйдет намного меньше
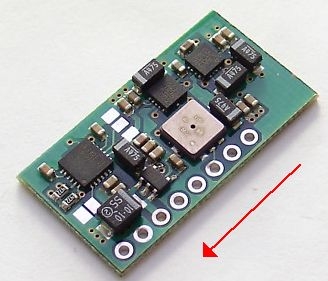
предварительные наброски одностороннего монтажа датчиков с чака и виимоушина со стабилизацией 3.3 вольта
стаб лучше в более мелком корпусе …
аксел какой развели ???
на гире землю заводить прямо на центральный пятак под 45 градусов , иначе без маски паять совсем хреново будет …
ну и без LLC некрасиво будет …
смотрите чего мултивий может с перепрошитыми ESC!
- народ говорит по yaw теперь и без магнетометра держит несколько минут!
разрешение со 125 до 250 поднято…
что-то не могу разобраться. как turnigy 9x подключить к ардуине (мега)? просто попорядку провода? или как понять какой канал за что отвечает?
что-то не могу разобраться. как turnigy 9x подключить к ардуине (мега)?
//RX PIN assignment inside the port //for PORTK
#define THROTTLEPIN 0 //PIN 62 = PIN A8
#define ROLLPIN 1 //PIN 63 = PIN A9
#define PITCHPIN 2 //PIN 64 = PIN A10
#define YAWPIN 3 //PIN 65 = PIN A11
#define AUX1PIN 4 //PIN 66 = PIN A12
#define AUX2PIN 5 //PIN 67 = PIN A13
#define CAM1PIN 6 //PIN 68 = PIN A14
#define CAM2PIN 7 //PIN 69 = PIN A15
#define ISR_UART ISR(USART0_UDRE_vect)
#define V_BATPIN A0 // Analog PIN 3
#define PSENSORPIN A2 // Analog PIN 2
смотрите чего мултивий может с перепрошитыми ESC!
Не нашел где можно скачать прошивку и под какие ESC она доступна?
code.google.com/p/wii-esc/source/browse/#svn%2Ftru…
впринцепе можно заливать в почти любой контроллер на атмеге, нужно только поднего свой конфиг написать …
//RX PIN assignment inside the port //for PORTK #define THROTTLEPIN 0 //PIN 62 = PIN A8 #define ROLLPIN 1 //PIN 63 = PIN A9 #define PITCHPIN 2 //PIN 64 = PIN A10 #define YAWPIN 3 //PIN 65 = PIN A11 #define AUX1PIN 4 //PIN 66 = PIN A12 #define AUX2PIN 5 //PIN 67 = PIN A13 #define CAM1PIN 6 //PIN 68 = PIN A14 #define CAM2PIN 7 //PIN 69 = PIN A15 #define ISR_UART ISR(USART0_UDRE_vect) #define V_BATPIN A0 // Analog PIN 3 #define PSENSORPIN A2 // Analog PIN 2
так всё и сделано. моторы при джойстике в правый нижний угол почему-то не заводятся.
если запустить конфигуратор - на джойстики реакция типа есть (полоски при манипуляциях шевелятся)
code.google.com/p/wii-esc/source/browse/#svn%2Ftru…
В принцепе можно заливать в почти любой контроллер на атмеге, нужно только поднего свой конфиг написать …
Вставлю свои 5 копеек уже проходили все это в соседней ветке, HK blueseries после прошивки регули просто пыхнули и все, будьте осторожнее там не только от атмеги все зависит, а еще и от ключей стоящих на регулях. Вобщем кто желает стать испытателем))))?