MultiWii

А каналы точно правильно подключены к Арудино ? а кто бы знал. на всех схемах написаны названия каналов. а на приемнике номера. как узнать соответствие номер-название?
Каналы у вас перепутаны судя по скринам (тротл вроде как на месте), соответствие узнать просто - подключайте каналы к адруине по очереди и в гуи смотрите 😃
upd: Упс не увидел что у вас турнига, тогда вообще все просто и правильно devv ниже расписал.
Кстати переделать на Mode2 очень просто, переставте внутри трещетку и пружинку на стиках местами и все.
Menu - System - Stick Set = видно номера каналов на ручках.
Menu - Func - Revers = видно названия привязанные к номерам (от 1 до 8)
Кстати переделать на Mode2 очень просто, переставте внутри трещетку и пружинку на стиках местами и все.
Да.
Не забыть в Menu - System - Stick Set выбрать Mode2
разобрался, стало так www.adslclub.ru/upload/img/…/11-21403014599.jpg
моторы все равно не стартуют.
разобрался, стало так www.adslclub.ru/upload/img/20...1403014599.jpg моторы все равно не стартуют.
Значение Яв мало, нужно 1900 или больше, либо править в коде прошивки, либо просто увеличьте расходы по яв на пульте.
подвинуть триммер правее для пробы. если поможет то увеличить E.Point у RUD до 105% или 110%
ЗЫ
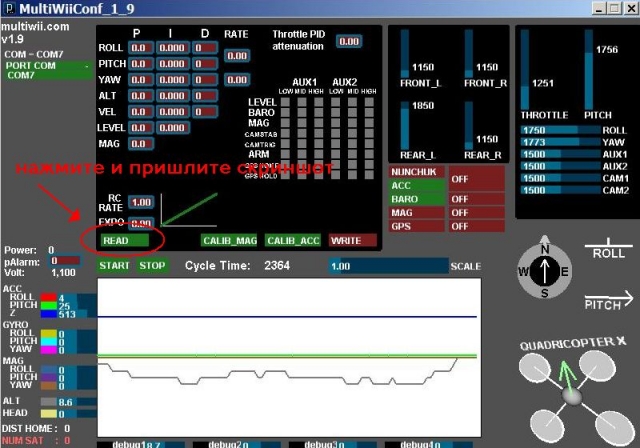
Почему roll 1296 показывает а не около 1500 ?
завелось, спасибо!
Почему roll 1296 показывает а не около 1500 ?
уже поправил, это настройка режима была неправильная.
поломал уже трое лопостей. пытаюсь просто ровно взлететь. нос всё время задирается вверх почему-то. если держать в руке, то сопротивляется попытке выправить. в чем может быть проблема?
думал датчики криво стоят, вынес их на проводке на раму - толку нет.
конфиг квадр, ардуина мега, сенсоры rcopen.com/forum/f123/topic221574/3837 , компас отключил на всякий случай - не помогает.
подключение двигателей проверил на 3 раза…
АСС откалиброван ?
через гуи кажет 0, 0, 512. как я понимаю это откалиброван.
через гуи кажет 0, 0, 512. как я понимаю это откалиброван.
ну да.
Может регули откалиброваны не одинаково, вот и задирает один из лучей ?
нос всё время задирается вверх почему-то.
скриншоты в студию, а лучше видео гуи
во время арма и дизарма в гуи как себя ведет квадрик
скачайте и установите программу для простоты выставления скриншотов и ВИДЕО здесь clip2net.com
во время арма и дизарма в гуи как себя ведет квадрик
без двигателей можно делать скриншоты? батарейка села.
арм/дизарм работают нормально
арм
www.adslclub.ru/upload/img/…/12-23010949998.jpg
дизарм
www.adslclub.ru/upload/img/…/12-23015322268.jpg
после арм двинуть газ вверх и показать картинку что на движках кажет.
нажмите кнопочку реад
с движками запустите (пропы снимите)
и скриншот сделайте, а лучше видео с помощью выше описанного сервиса
хм, что-то нашол. в зависимости от того откуда питаешь - разные значения.
ща буду думать
от батареи
www.adslclub.ru/upload/img/…/12-23180132638.jpg
от усб
www.adslclub.ru/upload/img/…/12-23184643845.jpg
у вас гироскопы не в теме
www.adslclub.ru/upload/img/…/12-23302326755.jpg
гироскопы если двигать - реагируют. щас на столе стоит потому ровно 0.
уберите оба параметра D=23 в 0 и попробуйте,что будет
У него и так все ровно, зачем ему что-то калибровать.
Видео можно сделать, что не так с коптером посмотреть? А то как то “пытаюсь ровно взлететь” вообще не располагает к экстрасенсорике.
А ты вертолетчик и умеешь литать только на гирах? Если нет, то летай в стабмоде, для этого поставать белые квадратики на AUX1 где LEVEL.
ПИДы такие Pitch P, Roll P на 3.0 и Level I на 0,030, если наровит перевернуться при взлете.
Помогите победить FLYDUINO www.rcgroups.com/forums/showthread.php?t=1381577
Немогу залить скетч.Купил переходник FTDI . Подключаю к плате адаптер как в описании платы разъем слева вверху .RST-DTR Tx-Tx Rx-Rx 5v-5v gnd-gnd . Открываю софт ардуиновский,выбираю COM на котором висит FTDI у меня свободным оказался COM115 , выбираю тип платы “Arduino Mega 2560” , открываю свой скетч,жмякаю “Upload” .Все это дело висит,диоды RX Tx не моргают :
Uploading to IO
Binary scetch size: 21974…
И висит.
Что делать???