Делаем раму коптера своими руками. Обмен опытом.

Где-то в этой ветке (по-моему) проскакивали сообщения про изготовление складной окты (может гексы), у которой все лучи складывались вниз. Примерно как эта, но крпеж для трубок был сделан по-массивнее и на мой взгляд надежнее. Больше половины темы вниз отмотал, но ничего не нашел. Дальше терпение кончилось. Если кто помнит где это было, то дайте ссыль пожалуйста.
возможно вы это имели ввиду parahawk
Примерно как эта, но крпеж для трубок был сделан по-массивнее и на мой взгляд надежнее.
Да все нормально в моей гексе с надежностью - летает и не кашляет. На фотках не видно, но внутри трубок алюминиевые втулки с отбортовкой.
А видели Вы скорее всего вот эту окту. Поищите по нику автора - подробные фотки выкладывались на соседнем форуме.
Мой квадрик
А какова масса рамы вышла? Какую фанеру пользовали?
А какова масса рамы вышла? Какую фанеру пользовали?
Честно говоря, фанера пришла мне уже нарезанная на лазерном резаке. Что там за фанера - хз. Весов у меня нет, но вся конструкция в сборе весит около килограмма. А вот лучи делали сами. 10мм квадрат
Поищите по нику автора - подробные фотки выкладывались на соседнем форуме.
давно добавил его себе в закладки, но там для изготовления зажимов нужен хороший интрумент, и трубки сверлить нужно
multicopter.ru/forum/viewtopic.php?f=2&t=2052&sid=…
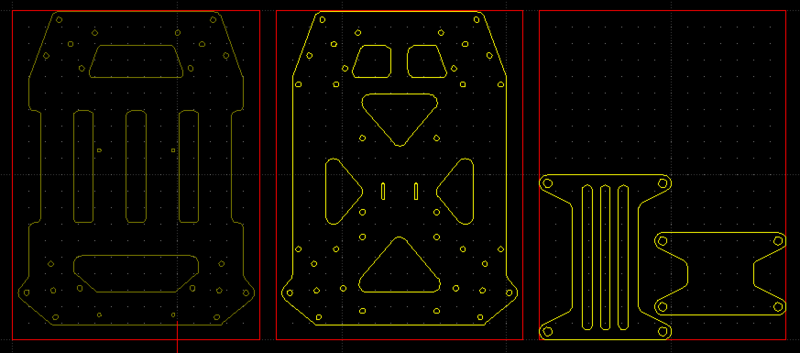
продолжаю в librecad’e пилить виртуальную раму. Второй раз переделываю проект 😃 Заодно немного освоился с работой в librecad’e 😃
Так а не сильно ослаблю конструкцию?
сам проект
www.dropbox.com/s/1pwc4fp78ktojc3/kopter.dxf
Еще бы узнать по какому принципу лучше вырезать отверстия… У товарища с комптером из фанеры постом выше дырке вырезаны везде за исключением мест пересечения лучей. У товарища же с хабра наоборот, дырки принципиально находятся на продолжении лучшей.
После первого блина комом хочется сначала сделать нормальный проект все таки а потом только пилить 😃
Спасибо!
продолжаю
У меня наивный вопрос. Зачем и почему моторы несимметрично расположены? Почему лучи, которые на чертеже нижние (задние?), не расположить как передние?
А передние я бы вообще на одну прямую поставил, чтобы так далеко консоль с камерой не выносить
У меня наивный вопрос. Зачем и почему моторы несимметрично расположены? Почему лучи, которые на чертеже нижние (задние?), не расположить как передние?
Компоновку, размах лучей, их угол - за основу взял компоновку TBS Discovery потому что
- гарантированно не попадают винты в кадр
- проверенная и рабочая конструкция на 10х пропах
- нравится ассиметрия 😃
ehs, возможно, прикину что получится, спасибо. А фигня вроде получается. Выставляешь передние прямо и получается два варианта
- длиннющие задние лучи, но плата получается короткая
- либо городить длинную плату, либо делать две половины и соединять их опять же трубками, в итоге то на то и выйдет по весу по моему.
Верхние два профиля у меня не силовые. Они будут лежать на демферах, и сверху просто прижаты винтами, чтоб не улетели. Эти профили будут нести аккум и гопро, что в итоге более тяжелый вес амортизируемого груза даст лучшую картинку на камере
нравится ассиметрия
Вопросов больше не имею.
продолжаю в librecad’e пилить виртуальную раму.
Увеличте расстояние между передними и задними моторами, а то прямоугольник получается. По питчу устойчивость хуже будет, с учетом разнесенной массы.

Распечатал чертеж. По нему расставил передние лучи и навесил винты. Решил все таки проверить с какого момента гопроха перестанет видеть винты. оказалось что в режиме r3 (60P) она их не захватывает с самого основания платы. В итоге значительно убрался перевес с носа, и батарея сдвинулась ближе к носу, Прикинул, получается как то так. Начинает совпадать с TBS Discovery по развесовке однако 😃
Хвосты пока не подрезал да и планку крепления батареи не отредактировал.
cylllka, подскажите пожалуйста, в этом случае получается задние моторы не нужно отодвигать?
подскажите пожалуйста, в этом случае получается задние моторы не нужно отодвигать?
В любом случае надо… Если на Вашем чертеже соединить оси моторов прямыми линиями, получится вытянутый по горизонтали прямоугольник. А должно быть ближе к квадрату, и чем ближе - тем лучше… Саша именно это и хотел сказать… А с учетом веса и расположения компонентов, у Вас должно бы быть наоборот, прямоугольник должен быть вертикальным…
Высоты картинки даже не хватило

не хочу показаться носорогом 😃 Но просто хотелось бы более детально разобраться в вопросе. Гляжу на компоновку дискавери (а размах и углы лучшей брал с нее) получается аналогичное расположение компонентов.
На первом рисунке углы корявые написаны кстати 😃 А на втором как я выяснил не углы лучей а углы до центра окружности которая проходит через все оси моторов
Кстати на одном из форумов наткнулся о настройке углов под которыми расположены движки в прошивке.
moderndrones.com/…/how-to-configure-offset-frames-…
В крайнем случае текущая моя компоновка чем грозит? Тем что PIDы придется тяжелее подбирать и они будут разные по крену и тангажу?
Просто та же дискавери как то летает, хоть и компоновка ассиметричная 😃
Devv, да, спасибо, я уже прикинул что получается это делать квадрат. В итоге проще будет сделать обычную Х образную раму и на продольных балках выносить вперед гопрошку, и сзади уравновешивать аккумом…
Если наза-можно так летать,на других контроллерах не пробовал.
плата Crius AIOP v2 с rctimer’a… с мегапиратом
Если биться за максимальную эффективность ВМГ - вписывать в квадрат,
если не заниматься ловлей блох, то оси моторок по окружности, как в тбс - нормуль, мозги справяться
и если CG совпадает с геометрическим центром тяги и летать блинчиком - то вообще пофиг!
зы. демпфера лучше концентрировать по переднему и заднему краям рамы, в середине они бесполезны, т.е. не работают на эволюциях по питчу из за большого плеча качели
Про демфера спасибо, так и переделаю.
То есть по идее если добиться того чтобы равновесие достигалось в центре окружности описанной вокруг оси моторов то должно быть все нормально?
Акро полеты меня слабо интересуют, больше планирую летать плавно и по возможности аккуратно 😃
Если так то получается такая бабочка 😃
www.dropbox.com/s/1pwc4fp78ktojc3/kopter.dxf
Да, и в вашей схеме эффективное количество демпферов перед/зад - может оказаться разным, условно 3/5.
Если в каких то попугаях измерить их упругость - можно примерно рассчитать на бумаге, на векторной схеме.
Чтобы не заморачиваться подобным - стараюсь делать кратные плечи.
про интерес к акро полетам: бывают еще спокойные полеты в неспокойной атмосфере 😃
Наткнулся я в Чип и Дип на раздел Материалы для моделирования и увидел там
EVG9517, Черный пластик 2 мм, 1 лист 15х30 см и EVG9516, Черный пластик 1,5 мм, 1 лист 15х30 см
lib.chipdip.ru/921/DOC000921715.jpg
Можно ли использовать место стеклотекстолита ???
Не сочтите за рекламу