ArduCopter Mega: порт на обычную Arduino (тестим)

и на ардупилот миним осд что то неподетски смахивает
Да это он и есть!
опять этот унылый MAX7456 (огромные буквы без графики)
К тому же дорогущий.
Я на 70й странице начал писать про этой PDF файлик.
Точно, я все вспомнить пытался, кто уже это дело использовал!
ИМХО, если что то и делать, так это использование акселя для стабилизации высоты. Ну то что в соседней ветке делают для MWI. Правда в ардукоптере и так есть что то подобное, но я никогда не использовал этот режим (ACCEL_ALT_HOLD)
у “нас” он стоит от $20 и до бесконечности
www.efind.ru/icsearch/?search=max7456
С графикой - dsPIC или FPGA или дрюкать SPI на AVR
не подскажешь что от меня хочет линуксовый avr компилятор?
Наверное проблема в том, что проект сделан для Arduino-0022, а у вас Arduino-1.0.
проблема в том, что проект сделан для Arduino-0022, а у вас Arduino-1.0
в Linux компилятор отдельно от IDE, поэтому что 0022 что 1.0 - разницы нет (да и под 1.0 уже вроде должно работать), забил уже - на смартбуке с более старым avr собирается и ладно =)
Этот шильдик удобный для наших проектов? Кто уже пользовался?
www.ebay.com/itm/…/270915907728
Блин, Александр не ту плату выслал, еще месяц ждать 😦 Пора ему уже филиал в Москве открыть для быстрой доставки.😎
Думаю, пойдет. У меня такая, отличается лишь уже впаянными разъемами. Я их все выпаял, оставил только двурядный. В него очень удобно втыкать всевозможный обвес для мозгов.
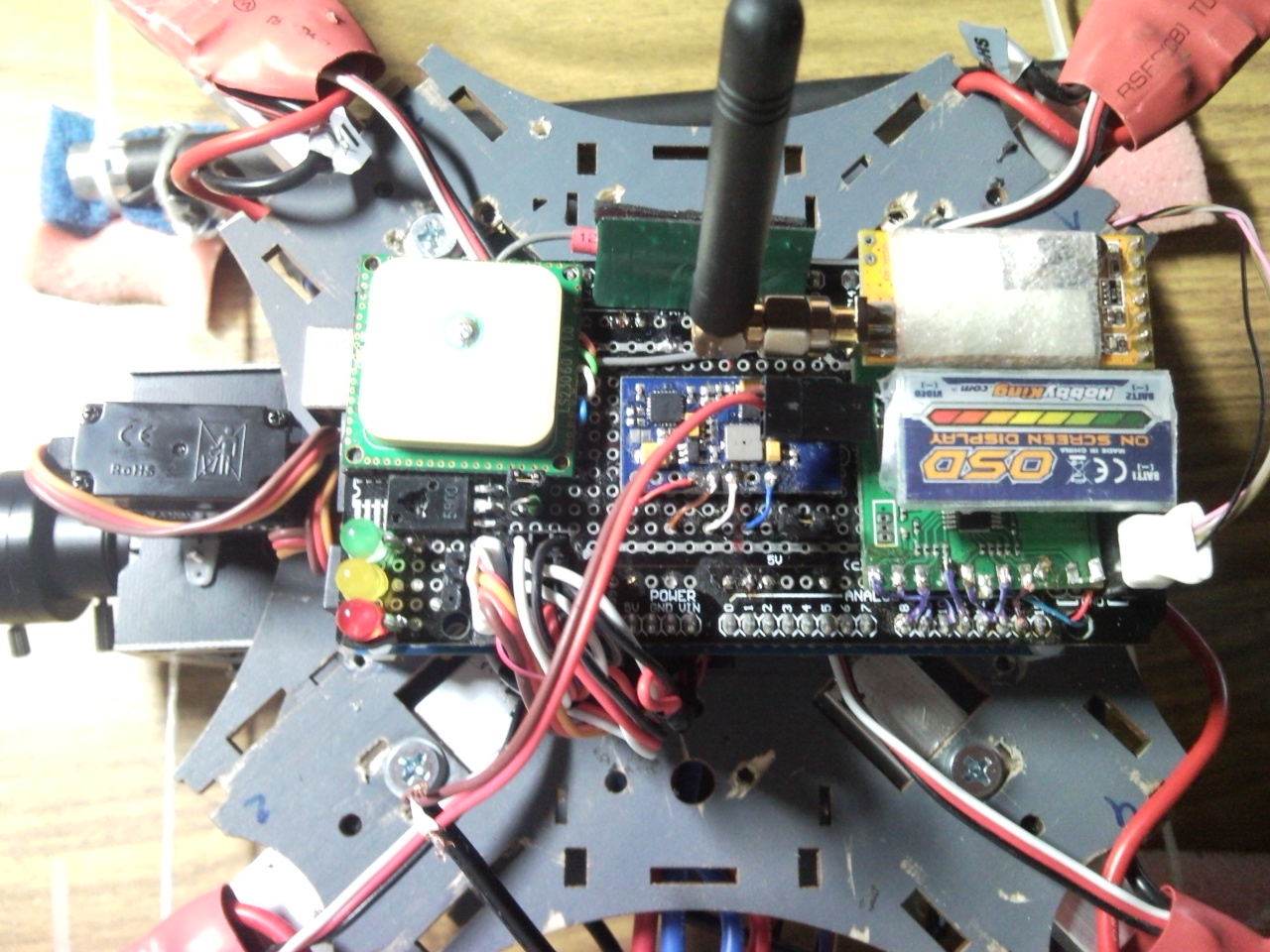
Все имеющееся на плате и воткнутое в разъем работает, ОСД с камерой прицепил лишь сегодня. На макетку прилепил приемник (скорее всего, этот уберу, а поставлю НК 6х с ppm_sum) на ней развел ключ для БАНО. Раму эту использую сейчас как стенд для обкатки, основной будет рама с гудлакибая, которая продается со скидкой.
Похоже моя ардуинка навернулась… 😦 Не могу залить прошивку в проц. IDE Начинает заливать и все подвисает (мигает изредка на плате красным светодиодом) (потом выдает timeout…). Причем по началу маленькие скетчи заливались нормально, а потом и они перестали…
Может у кого то такое было? Ардуина на выкидон?
eeprom умудрился убить? =)
eeprom умудрился убить? =)
Слишком часто прошифки загружал… гы гы. Кстати вот вот готова MPNG 2.4
Попробую еще подключится через программатор.
Похоже моя ардуинка навернулась…
Взять вторую и залить в первую через ICSP.
MegaPirateNG 2.4 доступна для скачивания: code.google.com/p/megapirateng/downloads/list
Внимание! Моя Ардуинка накрылась, так что проверить прошивку на ней я не могу. Только тест компиляции пройден!
Здравствуйте.Вопрос по комплектующим.Вот такой compel.ru/…/f6e9edf628100678a4f2cf36986f563c.pdf
GPS модуль подойдет для Мегапирата?Вообще,какой из недорогих модулей наиболее подходит для данного проекта?
Заранее спасибо.
Если кто то успел скачать 2.4, скачайте еще раз, закралась маленькая ошибка в либе GPS, из-за которой не будет компилится проект.
GPS модуль подойдет для Мегапирата?Вообще,какой из недорогих модулей наиболее подходит для данного проекта?
flytron.com/…/15-simpleosd-gps-module.html я такой использую. 10Гц работают, если в коде поправить.
Такой же ГПС продается на diydrones, но у них он может быть прошит спец.прошивкой с бинарным протоколом для оригинального Ардукоптера. Раньше у меня стоял 1Гц 9600 чип на Sirf III, тоже сносно работал, но дома не ловил. Новые чипы MTK MT332 принимают по 7 спутников даже на подоконнике.
Я ф шоке! Оказывается, Ардуина моя целая! Я в последней прошивке пытался пофиксить работу драйвера GPS_MTK16 - так вот, с моими правками, все компилилось, но не заливалось! Установить это удалось методом научного тыка (я уже добрался до avrdude и командной строки). Я не знаю как такое возможно, что бы проект скомпилился, но в зависимости от содержимого он мог заливаться или нет…
Похоже придется забить на этот MTK16 (Это бинарный протокол для MT3329) и выпустить еще раз прошивку.
Новые чипы MTK MT332 принимают по 7 спутников даже на подоконнике.
Спасибо.Собственно именно про этот L10 (MT3329) чип и спрашивал.Единственное,не нашел в описании частоту.
Спасибо.Собственно именно про этот L10 (MT3329) чип и спрашивал.Единственное,не нашел в описании частоту.
Тут на форуме рекомендуют MT3339, но где его можно купить я без понятия. (на дайдронсах продают 3329)
MegaPirateNG 2.4 доступна для скачивания: code.google.com/p/megapirateng/downloads/list
Алексей, возможно настроить эту версию прошивки на работу с последней версией AllInOne, которая вышла пару дней назад?
Там стоит модуль LSM330DL вместо привычных BMA180 и ITG3200 для акселя и гиры
Тут на форуме рекомендуют MT3339, но где его можно купить я без понятия. (на дайдронсах продают 3329)
я покупал MT3339 globaltop PA6C в питерской фирме аврорамобайл,
доставка обошлась 200р, в москву курьер принес на второй день
единственное что они не работают с физлицами, мне пришлось простить оплатить за меня моего знакомого ИЧП
ценник гдето около 750р за шт без доставки.
если собраться и найти желающих штучек на десять то я бы мог посодействовать оплате от юрлица по безналу
Здравствуйте.Вопрос по комплектующим.Вот такой compel.ru/…/f6e9edf628100678a4f2cf36986f563c.pdf
GPS модуль подойдет для Мегапирата?Вообще,какой из недорогих модулей наиболее подходит для данного проекта?
Заранее спасибо.
пойдет, один из лучших модулей на чипсете 3329, с завода у него разлочено 8 попыток записи конфигурации - как хочешь так и настраивай,
кроме того в него льется прошивка 3329 от дидронесов
есть небольшая инструкция по сборке : hobby.msdatabase.ru/…/ardupilot-gps
Алексей, возможно настроить эту версию прошивки на работу с последней версией AllInOne, которая вышла пару дней назад?
Возможно все, но это кто то другой должен будет сделать. Я не имея платы не сделаю.