ArduCopter Mega: порт на обычную Arduino (тестим)

Я цеплял к мегапирату сенсор AttoPilot, все отлично показывает. А этот сенсор, видимо, его клон, так что все будет работать.
Точнее, того, который за 9,67 выложен
ссылку можно?
Отменил заказ, описание неверное указали.
В 2.7 добавили код DMP MPU6000, но он 6axis а коррекцию по магнитометру делают уже на основном проце. Так же у них задействован INT pin - что может означать недоступность этой фичи на некоторых платах (где MPU распаян и добавить проводок проблематично). И самое главное, на APM2.0 - компасс подключен напрямую к процу, а не к AUX пинам MPU, в коде DMP они отключают I2C шину… так что не знаю, будет ли это все работать, т.к. если отключить i2c - отключится и компасс, а включишь I2c - вроде бы перестает работать DMP (но это я не проверял)…
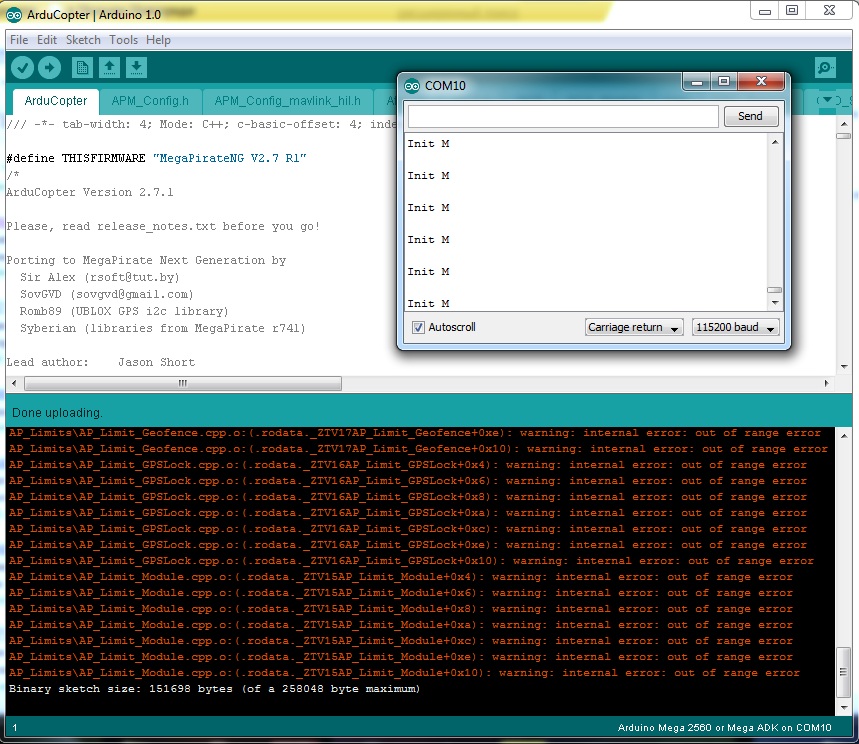
вот такая печалька, вечером буду продолжать портировать 2.7 😃
вот такая печалька
Действительно печалька…
А новоявленный портер использовал DMP?
что может означать недоступность этой фичи на некоторых платах
Как определить это у конкретных платах? Смотреть куда подключени INT?
А новоявленный портер использовал DMP?
Нет конечно, я уже писал, что это недопорт, т.к. большинство библиотек осталось от 2.6. Видимо он перенес только полетную часть от 2.7, а на все остальное забил. Я честно говоря все не проверял, посмотрел что код работы MS5611 остался от 2.6, а в 2.7 там многое поменяли (добавили фильтры).
Как определить это у конкретных платах? Смотреть куда подключени INT?
Да, INT должен быть подключен. Если на платках типа ALLINONE или FreeIMU - он выведен наружу, то в платах типа BV, Crius - навряд ли что либо сделаешь.
В любом случае, DMP - не обязателен, будет и без него работать.
Crius - навряд ли что либо сделаешь
Подпояюсь… все для пирата все для полетов 😃
Желающие попробовать MPNG 2.7 R1 - можно скачать исходники из SVN. У меня нету времени попробовать в полете…
P.S. Залил обычный дистрибутив code.google.com/p/megapirateng/downloads/list
Спасибо за релиз.
Мне вот интресно про DMP. Насколько он поможет в полете? (было бы класно если бы кто-нибудь провел сравнение 2.7 на оригинальном и на пирате) Так же есть настроженность что в последуюший версиях они матиматику полета начнуть точить пот данные с DMP. А нам насколько я понял его не видать. во всяом случае не всем. Боюсь что последуюший прошивки превратяться в нелетабельные для нас… ((( Поправьте меня если я не прав.
Вот-с…
Поправьте меня если я не прав.
Я пока не портировал DMP… посмотрел я на код и пока забил на него… Он все равно в статусе Бета - не включен по умолчанию.
Вот-с…
Не ленимся читать README. Надо использовать Arduino IDE 1.0.1
Да, действительно, с 1.0.1 пошло 😃 Давно не было потребности читать ридми, не думал, что требуемая версия компилятора изменилась.
А ведь неплохо летает, черт возьми 😃 Лучше, чем 2.6. Даже пиды, вобщем-то, менять не пришлось. Правда, поднимал коптер в квартире, но, тем не менее, таких диких осцилляций, как раньше, на стоковых пидах не возникло. До конца дня постараюсь на улице протестить.
А ведь неплохо летает, черт возьми
А можно узнать подробно используемую конфигурацию: Дачики процессов регули моторы вес расстояние между моторами и т.д. вообшем думаю понятно.
Малость полетал. Сначала на стоковых пидах, с 0:40 опустил (6-м каналом) rate P до 0,09.
На 2.6 тоже были подобные провалы газа в конце маневра, как на 1:35, с чем они связаны?
Провалов по высоте на 2.6 не замечал. Хотя не так много летал. Как коптер реагирует на стики? на 2.6 было такое ошушение что экспоненты стоят. при малом ходе стиком они аккуратно реагирует а потом очень сильно… на 2.7 такого нет? читал на дронах что в 2.7 вроде они это убрали/исправили/изменили (кому как).
Желающие попробовать MPNG 2.7 R1 - можно скачать исходники из SVN. У меня нету времени попробовать в полете…
Не успели облетать 2.6, а тут уже свежая появилась ) Спасибо!!!
В принципе и 2.6 R3 неплохо себя показала в полете, если хорошо ее настроить. Удержание позиции в ветренную погоду (5-6 м/с с порывами до 8) получалось с точностью до 5 метров на дефолтных настройках. Хотя показалось, что есть небольшая перекомпенсация.
На днях будем попробовать новую паршивку )
Выпустил MPNG 2.7 R2 - code.google.com/p/megapirateng/downloads/list
Из основного, поправлен баг с чтением температуры из MS5611, остальное по мелочи.
скажите, кто в курсе, на эту плату www.rctimer.com/index.php?gOo=goods_details.dwt&go… заливать прошивку 2.6_R5 и выше? я про поддержку датчиков на этой плате
2.6_r6 хорошо летает на этой плате
там нет ошибки?
если плата CRIUS_AIO_PRO_V1, то
#elif PIRATES_SENSOR_BOARD == PIRATES_CRIUS_AIO_PRO_V1
#define CONFIG_IMU_TYPE CONFIG_IMU_MPU6000_I2C
#define CONFIG_BARO AP_BARO_MS5611_I2C
#define MAG_ORIENTATION ROTATION_YAW_180
#define GYRO_ADDR 0x68
а на этой плате стоит
·MPU6050 6 axis gyro/accel with Motion Processing Unit