А давайте обсудим Arducopter - APM

Та на которой он находится в данный момент. 50% газа это и есть команда на захват и удержание высоты как сонару так и баро. При включенном сонаре приоритет по контролю предоставляется ему. Если он выйдет из зоны разрешения, то начинает рулить баро
Та на которой он находится в данный момент. 50% газа это и есть команда на захват и удержание высоты как сонару так и баро. При включенном сонаре приоритет по контролю предоставляется ему. Если он выйдет из зоны разрешения, то начинает рулить баро
У меня еще несколько вопросов:
- Что еще нужно указать в настройках Mission Planner кроме тех, что в статье code.google.com/p/arducopter/wiki/AC2_Sonar чтобы удерживалась высота? Или больше ничего не надо?
- Для чего тогда в Mission Planner указывать max altitude и min altitude, если высота регулируется дросселем?
- Можно ли в Mission Planner указать максимальную высоту, выше которой коптер точно не полетит, если дроссель по максимому?
Сонар для удержания высоты, ограниченной разрешением самого сонара. Максимум 7-8 метров в зависимости от типа сонара и поверхности над которой аппарат .
В миссии сонар не работает. При включенном сонаре высота фиксируется им. Изменять ее можно обычным способом - дросселем (газом). Если высота выйдет за предел разрешения сонара, то тогда рулит самостоятельно барометрический датчик
как много интересного можно тут узнать.
а в какой прошивке “в миссии сонар не работает”, в 2.9 вроде поменяли алгоритм при котором при обнаружении препятствия по сонару в авто режиме высота полета увеличивается и уже остается как минималка
и еще, в каких именно полетных режимах “При включенном сонаре высота фиксируется им”
заранее спасибо
а в какой прошивке “в миссии сонар не работает”,
В любой. В миссии функция сонара заблокированна, если что. В миссиях только баро и ГПС. Можно снять ограничение, переписать…еще кучу сонаров подцепить. Код открытый. Да и свои алгоритмы многие применяют давно. Было бы желание и цель. Зачем это ограничение сделанно, думаю объяснять не нужно.
обнаружении препятствия по сонару в авто режиме высота полета увеличивается и уже остается как минималка
Не остается высота… припятствия нет и он возвращается на прежнюю ранее установленную- огибание припятствия (это заложенно в алгоритме по эхо сигналу… дистанция по высоте до поверхности строго одинакова и ошибка не более 2-5 см)
и еще, в каких именно полетных режимах “При включенном сонаре высота фиксируется им”
заранее спасибо
Во всех, кроме ручного управления и полетов в миссии по точкам
Но еще интереснее планирование фото-видеосессии в миссии и даже простом кликгоу. Там одуренные возможности по автоприцеливанию камеры на обект по его кординатам !!! Для съемок на дистанции в слепую в автомате очень даже айс
Там одуренные возможности по автоприцеливанию камеры на обект по его кординатам !!!
Разве ROI сейчас работает? Randy обещал не раньше 3.1 вроде. Или я что-то пропустил?
В любом случае ROI по координатам работает на статические объекты. Типа ракеты в северной Корее поснимать зная их координаты. Шас думаю над оптическим roi.
Кстати вчера погонял RC4. Все хорошо но что-то скорость посадки веливокавата была. Даже не успевал зависать перед землей и стукался об землю. Кто тестировать будет обратите внимание на это плиз. У меня px4 хочу узнать будет ли такое на APM2.5.
Можно ли в Mission Planner указать максимальную высоту, выше которой коптер точно не полетит, если дроссель по максимому? Использую сонар.
Можно ли в Mission Planner указать максимальную высоту
В теории да. В последних прошивках (кандидатах) есть GeoFence. В МP даже есть его настройки. Но как это все работает и работает ли не проверял за ненадобностью.
а я тут наглядно заценил влияние вибраций … Поставил винты без колец . т.е. на валу болтаются .и … коптер ваще чудит . его кидает из стороны в сторону , он залипает в углах . теряет горизонт … но по высоте висит (= и даже по гпс пытается висеть (=
Можно ли в Mission Planner указать максимальную высоту, выше которой коптер точно не полетит, если дроссель по максимому? Использую сонар.
В дополнительных параметрах была какая то максимальная и минимальная высота.
Еще обратил внимание, что в Alt Hold при маневрах сбивается курс. Это может быть следствием влияния наводок на магнетометр или GPS модуль?
навсякий случай вдобавок попробуйте отключить авто обучение компаса.
я всегда калибрую компас вручную, проверяю адекватность красной линии на экране мишен планера и реальным курсом аппарата - по ориентирам (дороги, улицы) а автообучение отключаю
Кто нибудь калибровал повер модуль на новой прошивке на последнем планере, вставляю напряжение 5в жму ентер, при переходе к другому окну пишет ошибка и значение не записывется
Повторюсь как подкорректировать показания вольтметра на телеметрии, в крайнем планере убрали вообще окошко где вписывалось значение напряжения питания платы, и еще на прошивке 2.9 внешний диод у меня был на армин-дизарминг плюс он начинал моргать почти вместе с пищалкой когда батарея садилась , на новой прошивке он начинает мигать задолго до того как начинает пищать внешняя пищалка на акуме
навсякий случай вдобавок попробуйте отключить авто обучение компаса. я всегда калибрую компас вручную, проверяю адекватность красной линии на экране мишен планера и реальным курсом аппарата - по ориентирам (дороги, улицы) а автообучение отключаю
сегодня выровнял красную линию и реальный курс(“подогнал” через параметры корректировку компаса), автообучение отключено.
все равно крутит по Yaw на AltHold.
сегодня снова попытал Loiter, коптер повисел задумчиво наклоняясь и попытался улизнуть с нарастающей горизонтальной скоростью. пришлось перевести в AltHold после 2-3м побега.
потом со мной сыграл злую шутку FS по питанию и кончилось разломанным подвесом камеры и погнутым мотор маунтом.
заказал FY680 и приготовился к третьему, самому захватывающему курению сайта ардукоптер
кстати, вращение по яв может быть вызвано не совсем горизонтальным креплением моторов на круглой трубе?
вращение по яв может быть вызвано не совсем горизонтальным креплением моторов на круглой трубе?
у кого апм 2.5 питается от планки ВЫХОДОВ при установленном J1 или от 3DR повермодуля и при этом помимо автопилота с компасом и приемником навешено еще чтонибудь,
например телеметрия, осд
то ВАЖНО!
предохранитель F2 имеет низкий защитный ток и может самопроизвольно обесточить контроллер прямо в полете.
в самолетной теме rcopen.com/forum/f90/topic132831/1970 получили “письма счастья”, кто не следит, ознакомтесь с предостережением и вариантами решения
(в письме пишут про аирспид датчик, но в самом деле он крайне мало потребляет, и проблема шире)
кстати, вращение по яв может быть вызвано не совсем горизонтальным креплением моторов на круглой трубе?
соосность должна быть практически идеальной, проверять - ставите пропеллеры параллельно и смотрите сбоку через один на другой
иногда на курс влияют магнитные поля от силовых проводов.
если чем больше газ тем больше поворот то возможно это влияние.
проверяют контролем красной линии в мишен планере, при закрепленном аппарате - добавляете газ - линия не должна уходить
поворачиваете на 90 градусов - повторяете тест , и так на 180 и 270 градусах от начального курса
если показания компаса меняются - свиваете силовые провода в витую пару, убираете дальше от компаса
подскажите до какого значения должен быть уровень вибрации? И что с моим логом?
И как по графикам можно проверить правильность работы компаса?
вам нужно лог записать в память платы и потом оттуда считать . эти данные не ,что надо .
в теме это было , но чтобы не забивать ещё раз , могу через личку разжевать
для оценки вибраций
1 включают логирование raw (в пререлизах 3 прошивки IMU)
2 включают imu_mpu6k_filter = 43 при этом фильтре вибрации видны лучше
3 совершают короткий полет в стабилизации, ну минутку- две
4 скачивают лог датафлешь через терминал
5 из меню терминал - смотреть лог
6 смотрим по логу где был полет - по уровню газа - (3 канал)
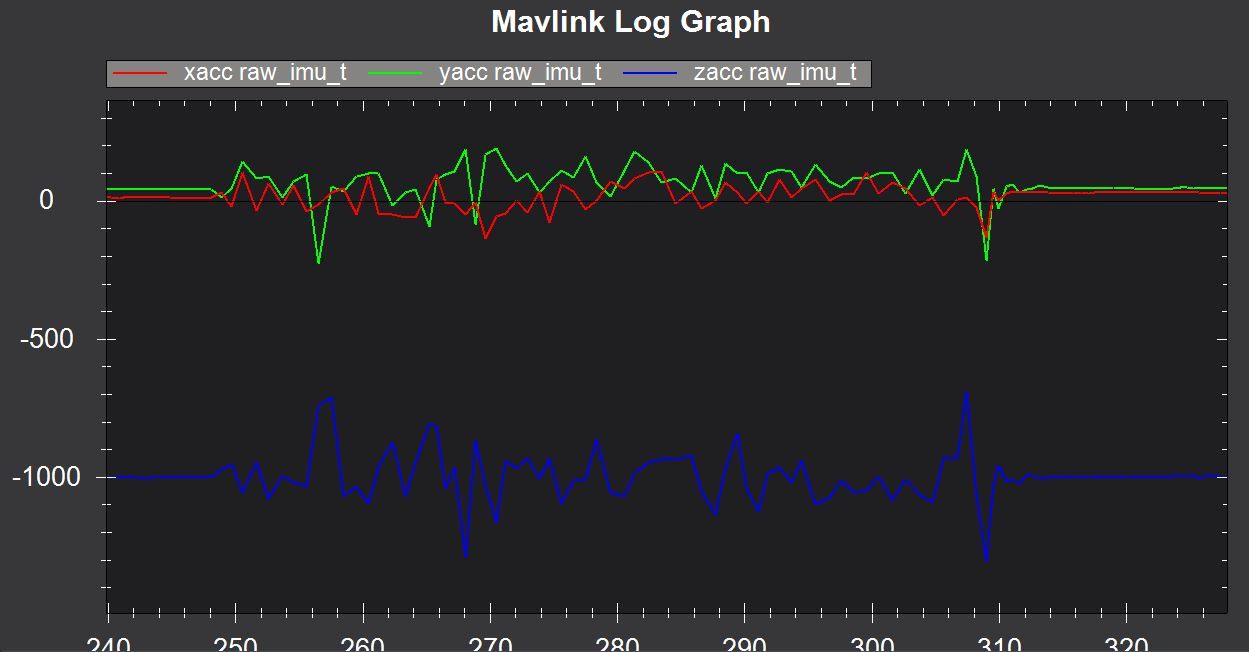
7 строим диаграмы трех акселей, получится нечто похожее на вашу, но будет гораздо больше итераций
8 из диаграмы образно исключаем броски связанные с касанием коптера земли при посадке
9 оставшуюся часть диаграммы анализируем- зэт аксель при горизонтальном положении всегда внизу на уровень 1G в приведенной выше диаграмме 1000 условных попугаев и есть 1 G
если в ходе полета с фильтром 43 гц среднее отклонение 10% (тоесть для вашей диаграммы от 1100 до 900) то вибрации малы и полет будет хорошим
если вибрациями заполнено все наполовину от уровня 1G тоесть для вашей диаграммы 500-1500 это очень плохо, коптер будет вести себя неадекватно
после теста нужно выключить избыточное логирование и восстановить фильтрацию imu_mpu6k_filter = 20 (можно поставить 0, в последних прошивках 0 это дефолтное, 20)
Еще вопрос, у меня в лойтере гекса начинает нарезать круги, пиды лойтера я не трогал, это компас или это пиды лойтера?
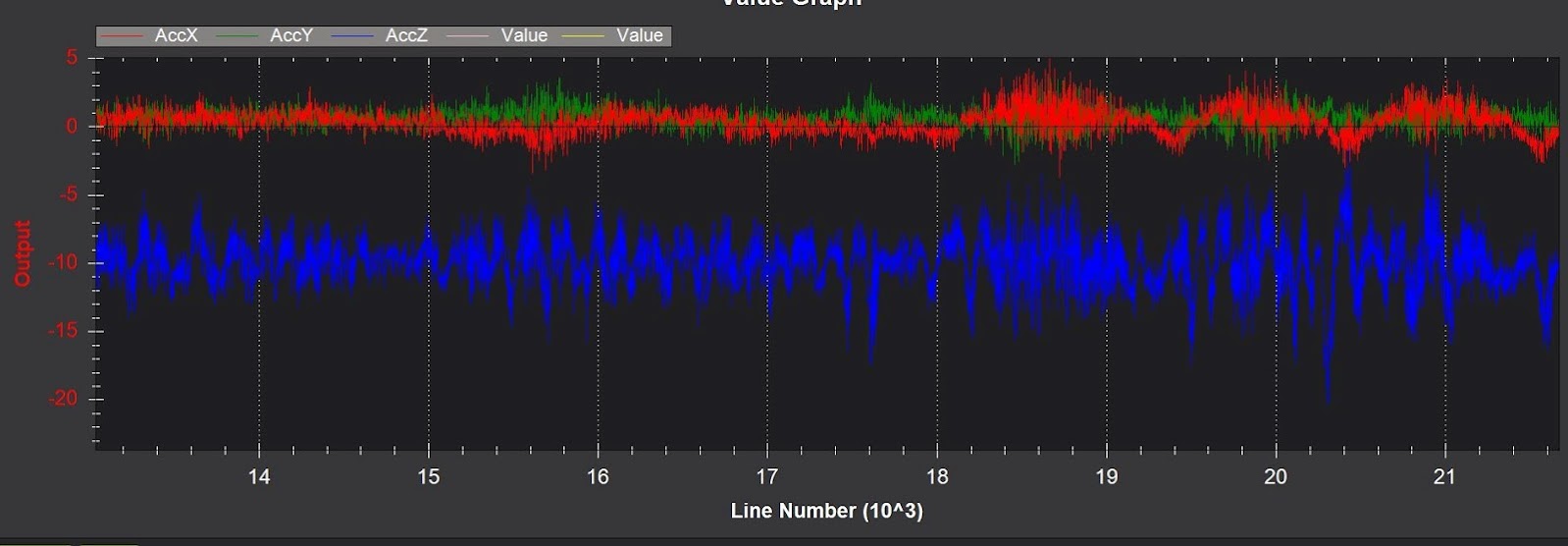
Вот что получилось с вибрациями! Не великоваты ли вибрации по оси Z?
Есть.
Вот что получилось с вибрациями! Не великоваты ли вибрации по оси Z?
если все это время коптер висел а не ускорялся вверх-вниз то великоваты, причем похоже есть точки резонанса рамы - в некоторых зонах например с 18 по 19 видны синхронные вибрации по всем осям,
хороший уровень вибраций по осям x и y от 0 до 15 отметки по оси line number
пиды лоитера трогать не надо,
сопоставьте реальный север по местности с показаниями красной линии в мишен планере с выключенными и включенными моторами
3.0.0-rc5 вышла