А давайте обсудим Arducopter - APM

вам нужно лог записать в память платы и потом оттуда считать . эти данные не ,что надо .
в теме это было , но чтобы не забивать ещё раз , могу через личку разжевать
для оценки вибраций
1 включают логирование raw (в пререлизах 3 прошивки IMU)
2 включают imu_mpu6k_filter = 43 при этом фильтре вибрации видны лучше
3 совершают короткий полет в стабилизации, ну минутку- две
4 скачивают лог датафлешь через терминал
5 из меню терминал - смотреть лог
6 смотрим по логу где был полет - по уровню газа - (3 канал)
7 строим диаграмы трех акселей, получится нечто похожее на вашу, но будет гораздо больше итераций
8 из диаграмы образно исключаем броски связанные с касанием коптера земли при посадке
9 оставшуюся часть диаграммы анализируем- зэт аксель при горизонтальном положении всегда внизу на уровень 1G в приведенной выше диаграмме 1000 условных попугаев и есть 1 G
если в ходе полета с фильтром 43 гц среднее отклонение 10% (тоесть для вашей диаграммы от 1100 до 900) то вибрации малы и полет будет хорошим
если вибрациями заполнено все наполовину от уровня 1G тоесть для вашей диаграммы 500-1500 это очень плохо, коптер будет вести себя неадекватно
после теста нужно выключить избыточное логирование и восстановить фильтрацию imu_mpu6k_filter = 20 (можно поставить 0, в последних прошивках 0 это дефолтное, 20)
Еще вопрос, у меня в лойтере гекса начинает нарезать круги, пиды лойтера я не трогал, это компас или это пиды лойтера?
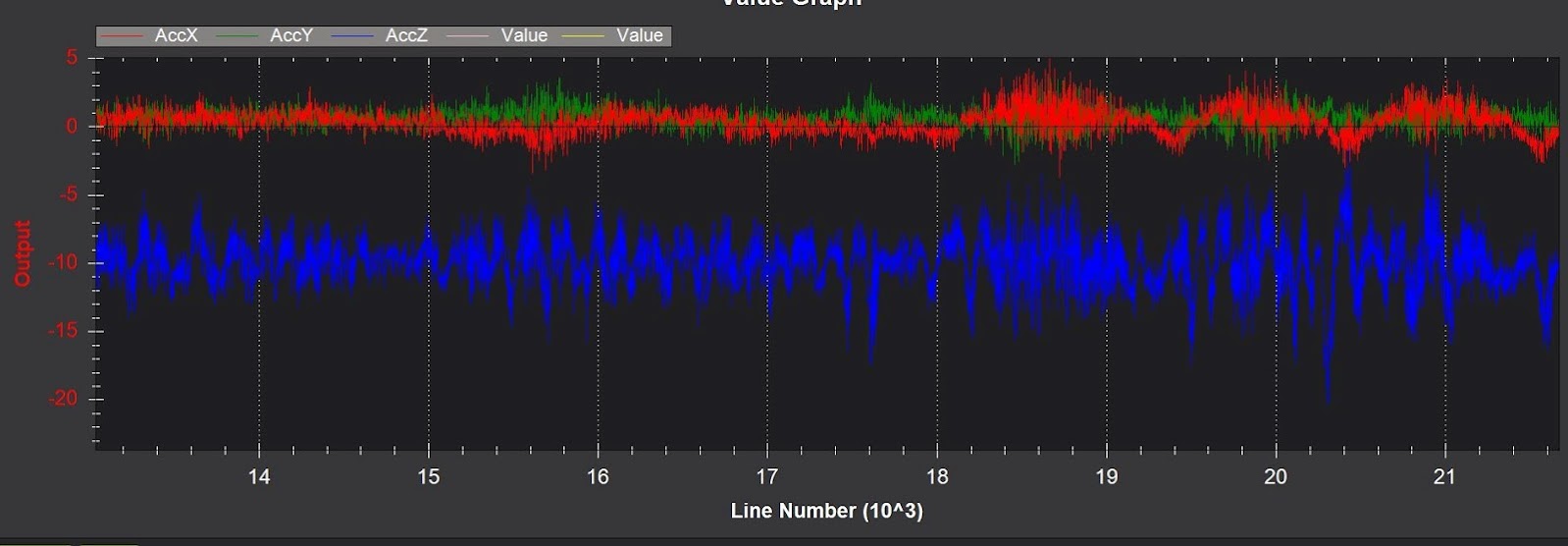
Вот что получилось с вибрациями! Не великоваты ли вибрации по оси Z?
Есть.
Вот что получилось с вибрациями! Не великоваты ли вибрации по оси Z?
если все это время коптер висел а не ускорялся вверх-вниз то великоваты, причем похоже есть точки резонанса рамы - в некоторых зонах например с 18 по 19 видны синхронные вибрации по всем осям,
хороший уровень вибраций по осям x и y от 0 до 15 отметки по оси line number
пиды лоитера трогать не надо,
сопоставьте реальный север по местности с показаниями красной линии в мишен планере с выключенными и включенными моторами
3.0.0-rc5 вышла
3.0.0-rc5 вышла
А я только что лойтер в rc4 настроил:)
3.0.0-rc5 вышла
список исправлений после 2.9.1.b
ArduCopter Release Notes:
------------------------------------------------------------------
ArduCopter 3.0.0-rc5 04-Jun-2013
Improvements over 3.0.0-rc4
- bug fix to LAND flight mode in which it could try to fly to mission’s next waypoint location
- bug fix to Circle mode to allow counter-clockwise rotation
- bug fix to heading change in Loiter, RTL, Missions when pilot’s throttle is zero
- bug fix for mission sticking at take-off command when pilot’s throttle is zero
- bug fix for parameters not saving when new value is same as default value
- reduce pre-arm board min voltage check to 4.3V (was 4.5V)
------------------------------------------------------------------
ArduCopter 3.0.0-rc4 02-Jun-2013
Improvements over 3.0.0-rc3- loiter improvements:
i) repositioning enhanced with feed forward
ii) use tan to convert desired accel to lean angle- stability patch improvements for high powered copters or those with roll-pitch rate gains set too high
- auto mode vertical speed fix (it was not reaching the desired speeds)
- alt hold smoothed by filtering feed forward input
- circle mode fix to initial position and smoother initialisation
- RTL returns to initial yaw heading before descending
- safe features:
i) check for gps lock when entering failsafe
ii) pre-arm check for mag field lenght
iii) pre-arm check for board voltage between 4.5v ~ 5.8V
iv) beep twice during arming
v) GPS failsafe enabled by default (will LAND if loses GPS in Loiter, AUTO, Guided modes)
vi) bug fix for alt-hold mode spinning motors before pilot has raised throttle- bug fixes:
i) fixed position mode so it responding to pilot input
ii) baro cli test
iii) moved cli motor test to test sub menu and minor change to throttle output
iv) guided mode yaw control fix
------------------------------------------------------------------
ArduCopter 3.0.0-rc3 22-May-2013
Improvements over 3.0.0-rc2- bug fix for dataflash erasing unnecessarily
- smoother transition to waypoints, loiter:
intermediate point’s speed initialised from copter’s current speed- Ch8 auxiliary function switch (same features as Ch7)
- safety checks:
Warning to GCS of reason for pre-arm check failure
ARMING_CHECK parameter added to allow disabling pre-arm checks
Added compass health and offset check to pre-arm check
compassmot procedure displays interference as percentage of total mag field- WPNAV dataflash message combined into NTUN message
- allow TriCopters to use ESC calibration
------------------------------------------------------------------
ArduCopter 3.0.0-rc2 13-May-2013
Improvements over 3.0.0-rc1:- smoother transition to waypoints, loiter:
reduced loiter max acceleration to smooth waypoints
bug fix to uninitialised roll/pitch when entering RTL, AUTO, LOITER- fast waypoints - copter does not stop at waypoints unless delay is specified
- WPNAV_LOIT_SPEED added to allow faster/slower loiter repositioning
- removed speed limits on auto missions
- enhance LAND mission command takes lat/lon coordinates
- bug fix for RTL not pointing home sometimes
- centrifugal correction disabled when copter is disarmed to stop HUD moving
- centrifugal correction disabled when sat count less than 6 (AHRS_GPS_MINSATS)
- compass calibration reliability improvements when run from mission planner
- bug fix to allow compassmot to be run from mission planner terminal screen
- add support for H-quad frame
- add COMPASS_ORIENT parameter to support external compass in any orientation
------------------------------------------------------------------
ArduCopter 3.0.0-rc1 01-May-2013
Improvements over 2.9.1b:- Inertial navigation for X & Y axis (Randy/Leonard/Jonathan)
- 3D waypoint navigation library (Leonard/Randy)
WPNAV_SPEED, WPNAV_SPEED_UP, WPNAV_SPEED_DN control target speeds during missions and RTL
WP_YAW_BEHAVIOR to allow disabling yaw during missions and RTL- PX4 support (some features still not available) (Tridge/Pat/PX4Dev Team)
- Safety improvements:
Tin-can shaped fence (set FENCE_ENABLED to 1 and copter will RTL if alt > 150m or horizontal distance from home > 300m) (Randy/Tridge/Leonard)
GCS failsafe (set FS_GCS_ENABLED to 1 and if you are using a tablet to fly your copter it will RTL and return control to the radio 3 seconds after losing telemetry) (Randy)
pre-arm checks to ensure accelerometer and radio calibration has been performed before arming (Randy)- motor interference compensation for compass (Jonathan/Randy)
- Circle mode improvements:
set CIRCLE_RADIUS to zero to do panorama shots in circle mode (copter does not move in a circle but instead slowly rotates)
CIRCLE_RATE parameter allows controlling direction and speed of rotation in CIRCLE mode and LOITER_TURNS (can also be adjusted in flight from CH6 knob)- SONAR_GAIN parameter add to allow reducing the response to objects sensed by sonar (Randy)
- support for trapezoidal quads (aka V shaped or FPV quads) (Leonard/Craig)
- performance improvements to dataflash logging (Tridge)
- bug-fix to analog read which could cause bad sonar reads when using voltage or current monitor (Tridge)
- bug-fix to motors going to minimum when throttle is low while switching into Loiter, AUTO, RTL, ALT_HOLD (Jason/Randy)
- bug-fix for auto disarm sometimes disarming shortly after arming (Jason/SirAlex)
список исправлений после 2.9.1.b
это плохо или хорошо, а то много иностранных букв и ничего не понять?
Судя по большому количеству строк bug fix я бы подождал до релиза, пусть остальные баги уберут 😃
Судя по большому количеству строк bug fix я бы подождал до релиза
и при наличии в этих строчках упоминаний про Лоитер - как то сразу понятно, чего это он туфтит
Вопрос скорее всего к Алексею
Может вы распишете по пунктам что надо сделать при переходе на новую программу?
Может это будет интересно многим, я имею в ввиду, что в процессе настройки коптера были сделаны какие то изменения, что то добавлено что то убрано, всего не запомнишь.
Что и как надо сохранить по настройкам, а потом сбросить в новую программу.
Надо ли делать опять калибровку радио? Ну и так далее
Мне например 2.9.1 очень нравится, все работает великолепно, но… может с новой программой будет лучше, но с другой стороны боюсь потерять что сейчас есть.
Ну вот я и дождался того что мне не хватало на PX4. Пора паять датчик тока copter.ardupilot.com/wiki/px4-analog-pins/
Может вы распишете по пунктам что надо сделать при переходе на новую программу?
- войти в адвансед параметрерс лист и записать настройки в файл - с тем чтобы не сделать хуже и оставить возможность откатиться если чтото пойдет не так
- залить свежую прошивку
- выполнить очистку памяти и сброс параметров на дефолтные для прошивки через терминал
- откалибровать радио, левел, компас, выставить режимы или перенести их из своего файла заранее сохраненного, через compare parameters - но тут надо четко понимать какие параметры переносите и для чего
а вообще хорошим поводом для перехода является релиз, если нет желания или возможности разбираться с тем что значат исправления в прошивке и коснулись ли они ваших потребностей.
лучше даже не просто дождаться релиза но и немного подождать пока его облетают другие
Всем добрый день.
Начал изучать Ардупилот.
И возникли некоторые вопросы.
Я так понимаю на сегодняшний день сама последняя версия ардупилота - PX4?
Но для создания трехи она не подходит, и если планируется делать трикоптер, то нужны выбирать APM 2.5?
Далее если я куплю APM 2.5 вот этот набор.
APM 2.5 + Set (No on board compass)
store.3drobotics.com/products/apm-2-5-kit-1
вместе с компасом и GPS
3DR GPS uBlox LEA-6 with Compass
store.3drobotics.com/…/3dr-gps-ublox-lea-6-8-9
комплектом телеметрии
3DR Radio Telemetry Kit - 433 Mhz (Europe)
…3drobotics.com/…/3dr-radio-telemetry-kit-433-mhz
ОСД
APM MinimOSD Rev. 1.1 Kit
store.3drobotics.com/…/apm-minimosd-rev-1-1
Сонар
MB1240 XL-MaxSonar®-EZ4™ High Performance Ultrasonic Range Finder
store.3drobotics.com/…/MB1240-XL-MaxSonar-EZ4
Вот здесь непонятно какое количество сонаров которые можно подключить к APM 2.5?
Я так понимаю на данный момент только 1 шт?
Большее количество не подключим?
Оптический стабилизатор
PX4FLOW
store.3drobotics.com/products/px4flow
Тоже не понятно, он предназначен только для PX4?
Или его можно подключить к APM 2.5?
Собственно вот такие вопросы.
Датчик напряжения и тока идет вместе с комплектом APM 2.5?
Если я приобрету все указанное выше будут ли идти в комплекте все необходимые соединительные провода и шнуры?
Не потребуется ли мне что то докупать потом еще раз?
Заранее спасибо всем ответившим.
И прошу не предлагать купить ArduFlyer или еще какой то клон с Хобикинга, и не обсуждать вопрос цены.
С уважением.
Если я приобрету все указанное выше будут ли идти в комплекте все необходимые соединительные провода и шнуры? Не потребуется ли мне что то докупать потом еще раз?
Если добавить в корзину комплект по вашей первой ссылке, то можно увидеть, что почти к каждому пункту идут добавки виде необходимых кабелей и разъемов.
Если добавить в корзину комплект по вашей первой ссылке, то можно увидеть, что почти к каждому пункту идут добавки виде необходимых кабелей и разъемов.
Почему то с осд в комплекте идут только штырьки для пайки.
Вот здесь непонятно какое количество сонаров которые можно подключить к APM 2.5? Я так понимаю на данный момент только 1 шт? Большее количество не подключим?
Только один.
Хотите больше, пишите код.
Оптический стабилизатор
PX4FLOW
store.3drobotics.com/products/px4flow
Тоже не понятно, он предназначен только для PX4?
Или его можно подключить к APM 2.5?
Думаю брать пока не стоит. к APM2.5 его навряд ли можно будет подключить. Его можно подключить к PX4 но ардукоптер его не поддерживает в данный момент. Насчет оригинальной прошивки тоже кажется не все гладко.
Я так понимаю на сегодняшний день сама последняя версия ардупилота - PX4?
Нет последняя APM2.5. PX4 специально под Ардукоптер не делался. Просто на нее портировали впрочем как и на VRBrain.
Но для создания трехи она не подходит,
Это с чего это вдруг?
Это с чего это вдруг?
Прчитал вот здесь.
…ethz.ch/…/is-px4fmu-already-suitable-for-tricopte…
И посмотрел схему поддерживаемых типов здесь
code.google.com/p/arducopter/wiki/PX4FMU_IORC
Ну отсутствие описания в вики еще не показатель. С точки зрения железа нет никакой разницы будет ESC или Серва. Факт есть что выходы работают на 490Гц тоесть аналоговая серва не прокатит. Вики кстати старая. Новая тут.
Вот нашел. На автосборшике есть прошивка на PX4 под треху. firmware.diydrones.com/Copter/latest/PX4-tri/