А давайте обсудим Arducopter - APM

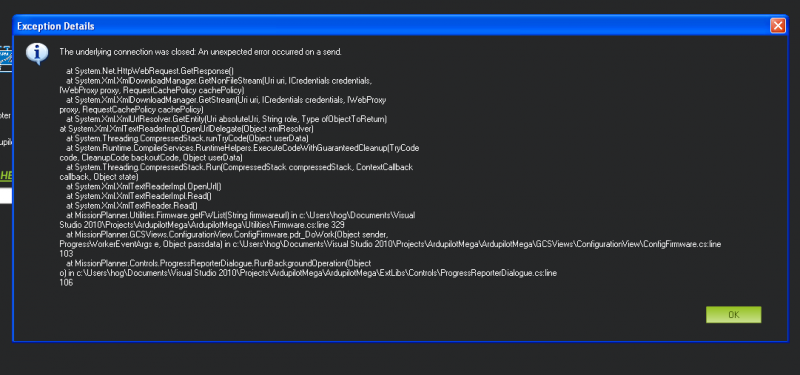
В МР 1.3.19 не могу обновиться до старой версии. Ругается чего то…
Телепаты, вы где?
Скриншот хотя бы покажите. Скорее всего надо перезалить загрузчик в мегу2560 и все заработает.
Телепаты, вы где?
Скриншот хотя бы покажите. Скорее всего надо перезалить загрузчик в мегу2560 и все заработает.
там мишен планер вроде дает ошибку при выборе из списка…
за последние несколько дней несколько человек спросило
там мишен планер вроде дает ошибку при выборе из списка…
Да, есть такое на крайней версии.
Скриншот хотя бы покажите. Скорее всего надо перезалить загрузчик в мегу2560 и все заработает.
Наверное дело все же не в загрузчике. Через МР залилась актуальная 3,2,1 без проблем. Сложности с заливкой старых прошивок. Если бы загрузчик косячил, то наверное и 3,2,1 не залилась бы…
Вечером сделаю скрин.
Скриншот хотя бы покажите.
При выборе предыдущих версий.

Так поставьте предыдущую версию МП и всех делов.
У меня МП 1.3.17 - отлично залил и 3.1.5 и 3.1 версию Ардукоптера. Никаких вопросов.
Где взять - выше была ссылка на скачивание.
Так поставьте предыдущую версию МП и всех делов.
Я это прекрасно знаю!
Просили скрины - я выложил.
Неровности ландшавта при арминге не важны?
Нет. Но после арминга главное не двигать коптер, в этот момент может происходить калибровка гир. Он должен быть полностью статичен в этот момент.
Раньше использовал вот такие демпферы:
вибрации, как правило, в пределах нормы, хотя иногда немного выходят за пределы. Летает нормально. Теперь использую двусторонний скотч с вспененной основой, который идет в комплекте к Pixhawk, вот тут его видно
s3.amazonaws.com/…/pixhawk_kit_reduced.jpg?1393193…
он толщиной около 5мм, очень мягкая основа. Вибрации гораздо меньше чем у демфера на резинках (по Х и У ±2), веса никакого, крепится быстро. Один недостаток - почти одноразовый (почти, потому что если аккуратно снять, то потом можно еще пару раз нацепить на тонкий безосновный двусторонний скотч). Вот где его купить отдельно не нашел - по маркировке 3М нашел только двусторонний безосновный скотч, который они клеят к этой вспененной 5мм основе.
Беру тут: rctimer.com/product-913.html Он такой крутой! Что у меня уже по всей квартире все на нем, от вентилятора вытяжки в туалете, до картин и роутеров на стене.
У меня есть и то и то. Так вот, с рцтаймера - несравнимо жоще и тоньше. (Как и все с рцтаймера 😃 ) Другими словами - даже близко не лежало.
Сам давно ищу аналог Пиксовскому. Пока безрезультатно.
Слетал называется настроил ПИДы… В теме про самодельные рамы недавно выкладывал логи. Было все идеальное. Минимальные вибрации, идеальное висение в альтхолде. Лойтер так себе.
лог
www.dropbox.com/s/8s64px3f9o00moo/good.log?dl=0Сегодня пошел, даже в стабе коптер не управляем. Так и хочет куда нибудь бросится. Логи показали повышенное, но вроде в пределах нормы вибрации, и резонансы.
лог
www.dropbox.com/s/28rqtyxl45yvioz/bad.log?dl=0На первом вылете кривая высоты была ровная а на втором скакала как бешеная. Поролонка имеется. Закрывает половину платы. Поролонка черная. Плата в корпусе. Свет пропускает корпус. Сегодня разобрал все и оклеил изнутри черной изолентой.
Летал оба раза примерно в одно и то же время. Там где лог красивый ~13 00, где ужасный ~15 00.
Конфигурация коптера была абсолютно одинакова.Блин если это чудо не полетит до следующей ЗП, точно удушу жабу и покупаю назу 😃
В связи с чем это произошло? что то менялось?
При выборе предыдущих версий.
точно такая же картинка
В связи с чем это произошло?
абсолютно ничего не менялось. Ну разве что на холодильнике простоял недельку. Температура на улице примерно одинаковая была. Примерно -5. Единственное что позже пришло на ум, в первый раз я ему дал постоянть на улице минут 10, поймать спутников, остыть немного. Потом я передернул питание и через минуты 3 взлетел. Во втором(худшем случае) я просто вынес его на улицу, он там постоял минут 10 и без передергивания питания начал летать.
он там постоял минут 10 и без передергивания питания начал летать.
а смысл выдерживать без сброса?
если гиры плывут то калибровка то при старте прошла и если не сбросить контроллер то плывущая гира будет все время играть с акселем в игру кто перетянет горизонт.
имхо кондер надо попробовать хороший поставить на 50 вольт в цепь 25в у mpu6000 или менять саму мпу
при отсутствии инструмента - тупо поменять контроллер
если гиры плывут от температуры - это ненормально
кроме вибраций по акселю есть еще группа показателей - шумы по гирам
как то можно по логам определить плывут гиры или нет?
теоретически если в состоянии покоя на одной из гир есть постоянная составляющая в плюс или в минус - значит гира уплыла показывает вращение которого нет
ну то есть в покое уровень должен колебаться, так?
постоянная составляющая должна быть ноль в покое
желательно чтобы и переменной (шум) небыло
чтобы убрать шум надо значения сэмплов посчитать как
сумма (омега * дельта времени)
омега - угловая скорость, значение исследуемой гиры
дельта времени - время между предыдущим сэмплом и текущим
Алексей, не туда полез… Это интегрирование - получение угла из моментальных угловых скоростей, а не фильтр…
А по датчику могу огорчить - это один единый микромеханический “организм” если “плывёт” 1 ДУС “плывут” и 2 остальных…
Алексей, не туда полез… Это интегрирование - получение угла из моментальных угловых скоростей
ну почему же, уход результата интегрирования показаний гиры и есть угол отклонения, если учитывать что рама в покое а отклоненние есть - значит разница между начальным положением и конечным углом и есть “уплывание”
другое дело что дрифт гиры компенсируется за счет вектора акселя , но собственно от акселя данные берутся медленно и притягивание горизонта идет через маленький коэф. поэтому если гира плывет достаточно быстро аксель не успевает “подтянуть” уровень.
интереса ради можно поиграться с высоковольтным конденсатором в цепи charge pump MPU6000. если коснуться его влажным пальцем (там обычно 24-25вольт) -гира поплывет и горизонт отклонится на некоторый угол
Я не о том, это не фильтр )))
чтобы убрать шум надо значения сэмплов посчитать как
сумма (омега * дельта времени)
оно шум не уберёт… это чисто интегрирование, а фильтр работает по другому:
берём так 0.9*предыдущее значение+0.1*новое значение, чем усредняем показания и устраняем ВЧ шум хотя в MPU его и так практически нет…
тоже самое усреднение и с готовыми углами гиры и акселя 0.9*угол гиры + 0.1*угол акселя - ну это так альфа-бета по простому, что получаем доверие в краткосрочной перспективе гире больше - она не шумит, но плывёт, аксель шумит - доверие меньше, но пока его показания усреднятся и не начнут действовать на алгоритм гира далеко не уплывёт и мы получим примерно правильный угол, а потом чтобы гира комфортно себя чувствовала мы его (угол усреднённый с обоих датчиков) пихнём в предыдущую формулу - в интегрирование как предыдущий угол, чем устраним ошибку интегрирования - во сказал, аж самому страшно )))
влажным пальцем
Слюнявым не советую, да оно и от обычного поплывёт…