Полетный контроллер DJI Naza M v1

Класс! Андрей! Можно использовать Ваше фото в личных, но некоммерческих целях?
Лучше отсюда возьмите. Там качество и формат побольше
fotki.yandex.ru/users/andreyfotoru/album/192970/?p…
Сегодня мне пришла Naza и комплект родных её регуляторов. Заказывал на foxtechfpv. Всё приехало в лучшем виде примерно за 2 недели.
плюс за счет больших грузов на концах лучей меньше дергается (важно для камеры)
А можно с этого места по подробнее? Мне что то интуиция подсказывала. что надо тяжесть в центре собирать, а концы лучей легче делать. Или я не прав? Просто если действительно дерготни меньше, повешу грамм по 20-30 дополнительного веса. Мне это не критично, запас есть.
конечно без рекомендаций, да на своих ошибках новичкам будет гораздо проще…
Вот для того чтобы новички не набили шишек и есть рекомендация отказаться от включения этой функции! 😉
Аккумулирую опыт людей многократно тут высказывающих свои аргументы по ОСОЗНАННОМУ выключению: С включенной функцией Наза увидев порог срабатывания идет на посадку, и ей абсолютно фиолетово что под ней - дерево или ребенок. Повесьте пищалку за пару долларов и дольше летать будете и коптер Ваш сядет там, куда Вы его направите с орущей пищалкой, и аккум дольше проживет. 😉 А рекомендации по настройке выработаем 😉 Надеюсь тезка ответил на Ваши вопросы 😉
А что если к ней килограммчик- полтора полезной нагрузки добавить? удержит 1 мотор луч? Не завалится? Кино в студию пожалуйста 😃
Соосник удержит, если с нормальным подходом просчитана конфигурация и СУ не загнана до предела. А вот классика получит крен сразу. Кино? Давайте Вы не будете меня подначивать… Соосники пробовал еще полтора года назад, опыт есть чуток. Да и народ Вам тут приводит аргументы, но Вы не хотите их слышать - на лицо почти троллинг…
Вдумайтесь лучше как настроить отсечку по питанию на Вуконге.
Аргументы даны выше - не желание или неумение их воспринимать только Ваша проблема.
Андрей какую нам фишку ожидать еще от Назы??
Не скажу! 😉)))))
Кроме того, сбилась горизонталь подвеса
Есть глюки, в крайней прошивке многое улучшилось но появились глюки необъяснимые. С данными от ГПС не связано, накопление ошибок внутри, видимо.
гекс при потере мотора сразу играет в игру “орел-решка”, Y6 при потере мотора летит, хоть и криво
Подтверждаю, и Наза тут ни причем. На любом контроллере так.
Возможно, имеет смысл покопаться в настройках миксера, если контроллер имеет соответствующий софт
У Назы доступа к микшеру нет, У Вуконга есть… Может быть добавят киты нам такую весчь, тогда и несимметричные рамы можно будет строить 😉
моргающий желтый это значит включился фаил-сайф, при его включении квадрик должен подняться на высоту 20 метров, прилететь на точку взлета, приземлится. Ваш квадрик начинает шуршать двигателями, а судя по бародатчику высоту набрать не может отсюда и движки дико крутятся…
Абсолютли верно 😉
Вот для того чтобы новички не набили шишек и есть рекомендация отказаться от включения этой функции!
при отключенной функции будет работать индикация светодиодом или нет?
у меня есть телеметрия HST-SS, но нет к ней HST-VOLT Sensor если я на вход V подключу провода от аккумулятора, то будет ли это работать? или этот сенсор не простой коннектор?
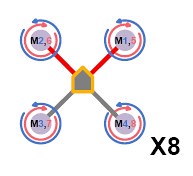
подождите, мы ведь обсуждали квадрик по схеме как на X650V-8, а не соосную схему (мотор над мотором и пропы соотвественно друг над другом) и схему подключения к назе?!
Вот не вникал что за схема у X650V-8 😉 Дайте картинку плииз 😉
Мне казалось мы говорим о сооснике на основе квадра. С управлением с помощью Назы им как квадриком. А расположение моторов как на рисунке ниже, но поскольку микшера ОКТО у Назы нет, мы и используем микшер Квадрик… Завернул и вывернул 😉
при отключенной функции будет работать индикация светодиодом или нет?
О какой индикации идет речь? 😉)) Индикация полетных режимов никуда не денется, а индикация отсечки по питанию конечно же не будет работать - она же выключена…
у меня есть телеметрия HST-SS
Не скажу ничего - не знаком 😉 Думаю что если сенсора питания нет то работать не будет…
Мысли к нам приходят из общего инфополя 😉)) Или ка говорят - идеи летают в воздухе, ловите… Только мы тут спорим про сосники, поводом к спору послужила публикация видео с полетом гексы с соосной СУ на Назе. Вот еще одно интересное видео. Особливо для тезки будет полезно посмотреть 😉 Вот Вам еще аргумент 😉
Наш старый знакомый Фердинант снова полетал ФПВ на своем 12ти роторном агрегате, и в полете решил сделать флип… Сделал, и коптер лишился двух верхних моторов с одной стороны! Ну и прилетел домой, не без осложнений, но прилетел 😉 Кстати винты интересно стоят, снизу граупнер или 10" или 11", сверху слоуфлаер, эффективность неизвестна 😉
Подскажите, кто знает, почитал ФАК еще раз, не нашел ответа. Столкнулся с такой ситуацией. Контроллер NAZA + GPS, все подключено. Вчера дома настраивал режим фаил сейф, без винтов конечно. В Асистанте все настроил, то есть при отключении питания передатчика, ползунок в стает в синюю зону фаил сайф, все ок, все остальные ползунки, стоят на месте в Асистанте. Дома спутники понятно не ловит, моргает красный 3 раза. Запускаю двигатели, даю немного газу. Не важно какой режим выбран Манула/Ати/GPS при выключении приемника, загорается часто моргающий желтый, но все движки при этом начинают дико крутиться!!! То есть это связано с тем, что не найдены спутники и режим фаил-сайф работает не корректно? Просто напрягает такое поведение, в инструкции кончено написано, что сначала отключайте батарею, а потом передатчик, но все же. Интересно, если отключить модуль GPS реакция у моторов какая будет? Аппаратура Турниги 9, без прошивки, ВЧ - FrSky.
…
Проверьте настройки файлсэйфа в самой аппаратуре. Рекомендуется настроить все основные каналы управления принудительно в FS на среднее, центральное положение стиков. Возможно так оно сейчас и есть, тогда коптер при отключении аппы несколько секунд до выполнения процедуры возврата следует настройкам файлсэйфа и стремиться перейти в положение зависания, и моторы в этом случае будут крутится гораздо быстрее холостого хода до взлета.
Сергей, а нет возможности проверить родные НАЗОВские регули 30А ОРТО?
Александр, этих регулей у меня нет в наличии. Можно отдельно и их проверить, если кто-нибудь предоставит на время один регулятор для этого.
Рекомендуется настроить все основные каналы управления принудительно в FS на значение 50% (центральное положение стиков).
я так понимаю есть два режима фейл-сейф
- на приемнике
- на назе.
если сработал режим на приемнике, то он переводит стики в то положение которое запрограммировано заранее, т.е. если они в середине то аппарат должен зависнуть. Но для чего это? что с ним дальше делать?
если сработал фейл-сейф на назе то аппарат либо сразу садиться, либо поднимается, летит домой и садиться эти варианты выбираются в ассистенте.
я настроил так что бы при сработке фейл-сейф на приемнике сразу же срабатывал фейл-сейф и на назе и далее автопилот до дома…
я настроил так что бы при сработке фейл-сейф на приемнике сразу же срабатывал фейл-сейф и на назе и далее автопилот до дома…
Все верно, у Вас получилось! 😉
Другими словами: при потере связи с аппой приемник выдает значение “ФейлСейв” в Назу по 5му каналу. И Наза, если все настроено в Ассистанс, идет “домой” или садится где придется 😉
Другими словами: при потере связи с аппой приемник выдает значение “ФейлСейв” в Назу по 5му каналу.
именно так!
если сделать как советовали выше: при потере связи между приемником и передатчиком все стики в центр и не передать фейл-сейф по 5 каналу, то наза зависнет в последней точке и будет висеть пока аккумуляторы не сдохнут. А потом либо упадет, либо сядет по контролю напряжения(если он включен)
а если пришел фейл-сейф по пятому каналу, то назе безразлично в каком положении стики.
Вообщем поигрался еще, фаил сейф в приемнике, настроен только на 5-й канал, так, чтобы при пропадании сигнала в назе ползунок вставал в синию зону фаил-сейфа, канал газа при срабатывании фаилсейфа, в Асистанте ставится в 0 и в приемнике он тоже в 0 настроен. Если НАЗА в режиме Мануал и отключаю передатчик, движки все равно крутятся как бешеные, причем крутятся долго, видимо пока не сядет батарея. В режимах Алт и GPS движки крутятся не сильно и через некоторое время отключаются, видимо отрабатывает режим посадки. Скажите вообще в режиме Мануал кто-нибудь летает? Может нафиг повесить на двух позиционном выключателе Алт и GPS и не мудрить?
Может у себя кто проверит в режиме Мануал как срабатывает фаил-сейф, только ВИНТЫ НЕ ЗАБУДЬТЕ СНЯТЬ!!!
Может нафиг повесить на двух позиционном выключателе Алт и GPS и не мудрить?
А как тогда компас колибровать будете???
Может у себя кто проверит в режиме Мануал как срабатывает фаил-сейф, только ВИНТЫ НЕ ЗАБУДЬТЕ СНЯТЬ!!!
А инструкцию почетать что мешает??? Там все расписанно что будет
А инструкцию почетать что мешает??? Там все расписанно что будет
Спасибо, Александр, еще раз прочитал инструкцию и нашел свою ошибку, там есть такое замечание, важное которое я пропустил “НЕ ЗАДАВАЙТЕ fail-safe положение throttle стика ниже ниже 10 %”, а у меня было 0%. Задал фаил сейф на газ более 10%, теперь в режиме Мануал, все работает корректно, газ встает на заданный процент! Все еще раз спасибо, кто отозвался! Завтра планирую облетать НАЗУ!
Александр, а зачем вам режим мануал на Назе?
Вы хотите акробатикой заняться?
я так понимаю есть два режима фейл-сейф
- на приемнике
- на назе.
если сработал режим на приемнике, то он переводит стики в то положение которое запрограммировано заранее, т.е. если они в середине то аппарат должен зависнуть. Но для чего это? что с ним дальше делать?
если сработал фейл-сейф на назе то аппарат либо сразу садиться, либо поднимается, летит домой и садиться эти варианты выбираются в ассистенте.
…
При потере сигналов управления с пульта РУ файлсейф у назы включается не сразу. Наза несколько секунд отводит на восстановление связи (ждет) и только потом начинает действовать согласно установкам в ассистансе, т.е. садится сразу или лететь домой.
Весь вопрос в том, как ведет себя наза эти несколько секунд ожидания восстановления связи. Могу ошибаться, но кажется наза (и вуконг) продолжают при разрыве связи действовать согласно поступающим с каналов приемника данным. И если, например, в приемнике на каналах управления была настройка для FS сохранять последние до разрыва связи уровни, то наза будет лететь “по инерции” туда же, куда летела до этого и с той же скоростью. Что может быть опасным. Вот поэтому будет лучше, если наза сразу после потери связи в своих “раздумьях” перед возвратом принудительно остановится и зависнет на месте. Имхо это безопаснее, да и самому коптеру будет проще начинать обратное движение из этого состояния.
Вот не вникал что за схема у X650V-8 Дайте картинку плииз
Мне казалось мы говорим о сооснике на основе квадра. С управлением с помощью Назы им как квадриком. А расположение моторов как на рисунке ниже, но поскольку микшера ОКТО у Назы нет, мы и используем микшер Квадрик… Завернул и вывернул
Да, все верно Андрей, именно эта картинка т.е. при подключении моторов на каждый канал сажаем 2 мотора с разнонаправленым вращением указываем в ассистенте квадрик и всё?
Битва Назы с Вуконгом ( Вуконг идет в атаку)
Битва Назы с Вуконгом (Атака отбита)
Да, все верно Андрей, именно эта картинка т.е. при подключении моторов на каждый канал сажаем 2 мотора с разнонаправленым вращением указываем в ассистенте квадрик и всё?
Нуууу как бы да 😉 С точки зрения коммутации 😉 А дальше начинается тонкая доводка, потому что может не хватать “рудера” или его будет много, соосная СУ будет прожорлива, акков будет не хватать… и т.д. 😉 Но в принципе квадрик готов лететь 😉
Битва Назы с Вуконгом ( Вуконг идет в атаку)
Битва Назы с Вуконгом (Атака отбита)
Да, только Наза не смогла отбить атаку человека пилотировавшего её - не вырулил из петли и мягко рухнул на землю - в минус “школьные линейки” “ног” и три луча (сильно погнуло) - моторы в разные стороны… После краша всем на удивление гекса ровно поднялась в воздух и почти также послушно зависла не обращая внимания на то что моторы развёрнуты в разные стороны 😃
Ещё раз убедился в мегастабильности назы )))
P.S. Видать в Киеве чересчур урожайный год 😃
Она не просто мегастабильна 😃 Есть фишка прикольная: если в Атти режиме на месте не висит, просто стиками чуть в противофазе компенсируем и отпускаем их - теперь висит просто на месте 😃 И никаких триммеров!
Ура, сегодня состоялся первый полет моей НАЗА. При весе 1700гр с аккумулятором отлетал в спокойном полете вокруг себя ровно 15 мин, до посадки, акк 5000мАч 4S, дома залилось 4100мач, то есть смело еще пару минут можно летать, надо только отсечку поставить пониже. Винты пока только опробовал родные 8х4.5. Мне очень понравилось как летает. Все GAIN по умолчанию 100%. В точке держится хорошо, правда иногда при отлете и бросании стиков начинала немного по кругу гулять, после поправки стиками гекса снова замирала на месте. Почитал с чем это может быть связано, надо попробовать компас откалибровать на улице, а то был откалиброван дома. В Асистанте точку смещения компаса тоже задал. Не совсем понятно, как правильно найти точку ЦТ по высоте, поставил расстояние от верхней палубы. Так что, впечатления положительные, теперь ГоПро буду крепить.