SteadiСopter

Алексей, можно попросить схему подключения подвеса в версии с ZYX-GS?
Алексей, можно попросить схему подключения подвеса в версии с ZYX-GS?
На моем прототипе последовательность устройств такая:
Приемник > ZYX-GS > гироскоп > серва
На ZYX-GS и на гироскоп от приемника идут еще два канала для управления режимом. Если двух свободных каналов для этого нет, то можно использовать генератор двух фиксированных ШИМ (PWM) сигналов (сервотестер). Я вместо сервотестера мастерил самодельный микро-генератор, который синхронизировался с приемником (на всякий случай, что бы последовательность сигналов была постоянной). Но многие брали обычные миниатюрные сервотестеры. А теперь я использую 12-ти канальную аппаратуру и этого хватает на все нужды. По минимуму Ecilop Easy можно сконфигурировать с восьми-канальной аппаратурой.
Выпущено усовершенствование для усовершенствования.
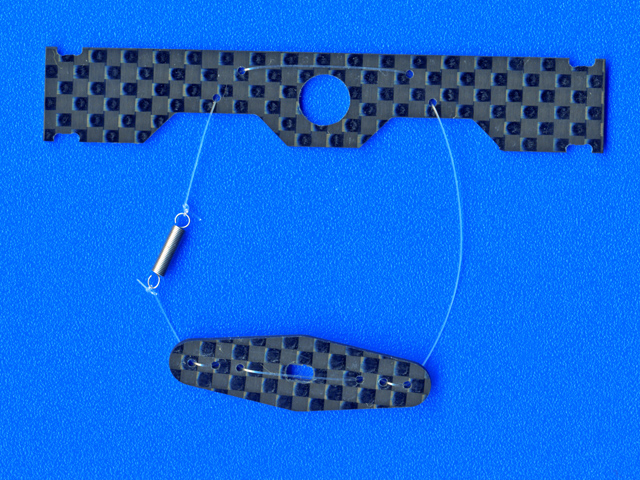
На аппарате Ecilop Easy/Stereo использована леска для вращения потенциометра.
В процессе эксплуатации леска может быть растянута и натяжение будет утрачено.
Что бы этого не происходило, устанавливается пружина, которая обеспечит постоянное натяжение.
Завяжите концы лески на пружине. Пружина устанавливается только с одной стороны качалки.
Пружина должна быть растянута до длины 15-25мм (длина до растяжения -10 мм).
Всем, кто купил F-Servo upgrade дополнительные пружины высланы бесплатно.
А если вместо лески использовать тонкую металическую нить?
А если вместо лески использовать тонкую металическую нить?
Тогда уже лучше установить жесткую тягу. Смысл в том, что система тяни/тяни точнее, и соединение должно быть гибким. Рыболовная леска предназначена для весьма жесткого использования, но с пружиной постоянное натяжение обеспечивается лучше.
Пример настроек последнего прототипа Ecilop Easy
Комплект:
Ecilop Easy frame
MT3506 motors
12”x4” VOX propellers
T-motor 18A speed controllers
5800mA/h 4S battery
DJI NAZA + GPS flight controller
MKS DS8910A servo
Turnigy mini MEMS gyro
ZYX-GS gimbal controller
Futaba R6014FS receiver
Sony NEX-5 camera, 18-55mm lense
Shutter and Record remote controller
Zoom servo
HDMI to AV converter
Simple OSD module
200 mW 5.8Ghz transmitter
Futaba T12FGH Remote
Turnigy 9X transmitter
FrSky V8HT TX module
FrSky D8RSP receiver
Video Goggles 640x480, Dual Rx
Lilliput 7” field monitor
Video receiver
Belt mount
Гироскоп Turnigy MINI MEMS, настройки:
Servotyp 076-50
Gydirect NORM
Mid-trim 000
H-limit 200
L-limit -200
Rpirgain 150
Lpirgain 150
Acc-exp 010
Dec-exp 010
Deadband 005
Rud-gain 050
n-rudexp 000
a-rudexp 000
Gain -100%, режим Normal
Ecilop Easy пружины 0.4N/mm
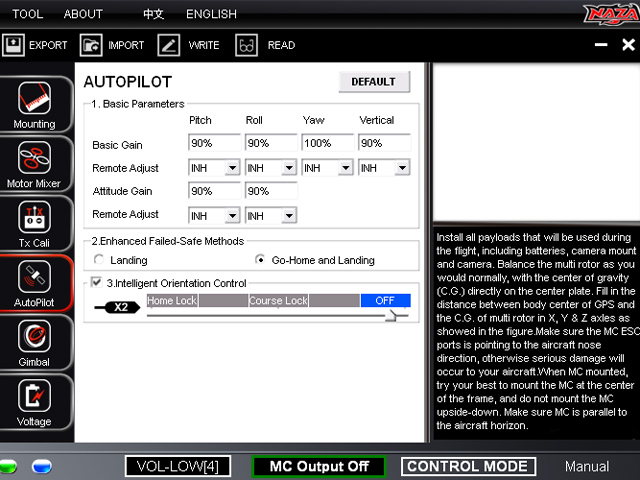
Настройки Naza:
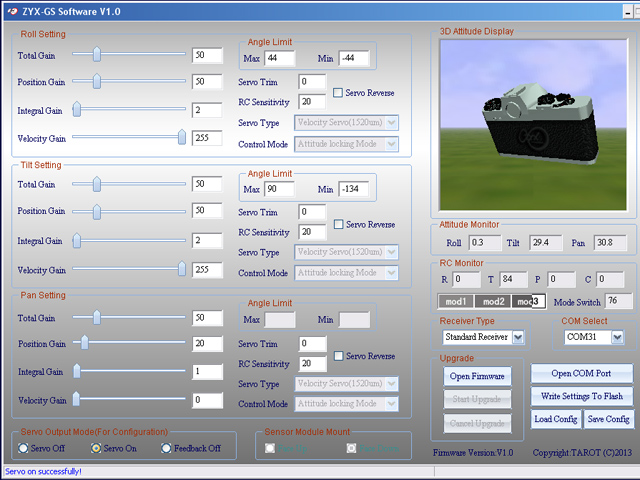
настройки ZYX-GS:
Получил вопрос о причинах дрожания сервомеханизма (Ecilop Easy, Force Servo).
Возможны такие предположения:
- Слабое натяжение лески (пружина должна быть растянута с 10 до 20мм).
- Высокое значение усиления для гироскопа (пропадет дрожание при снижении усиления).
- На корпус гироскопа передаются вибрации от сервомеханизма (использовать для гироскопа мягкие прокладки с промежуточной металлической пластиной и провод изогнуть петлей)
- Дефект в потенциометре (обычно дрожание проявляется в определенном положении качалки потенциометра).
- Заедание шестеренок (качалка сервомеханизма с трудом вращается пальцами при выключенном питании).
- Контроллер положения генерирует странный сигнал управления (проверяется при помощи сервотестера).
По описанию производителя ресурс потенциометра - не менее 1 000 000 поворотов.
Если обнаружены заедания в редукторе, то зачастую помогает следующее:
разобрать сервомеханизм, покрутить в ручную все шестерни на их осях и убедившись, что заеданий больше нет, собрать обратно.
Мы тестировали каждый модифицированный сервоммеханизм.
Это демонстрация теста исправного серво-механизма:
Дефект сервомеханизма DS8910A+
Мы обнаружили, что в сервомеханизмах DS8910A+ часто возникает заклинивание одной шестерни. Если качалку сервомеханизма трудно покрутить пальцами, то это признак проблемы. Проблема может проявиться не сразу. Сперва сервомеханизм может работать нормально (ось прокручивается в пластиковом корпусе). На аппарате Ecilop это нарушает работу подвеса камеры.
Для устранения проблемы необходимо разобрать редуктор сервомеханизма. Обратите внимание на вторую шестерню в редукторе. Эта шестерня может быть заклинена на своей оси. Иногда достаточно вытащить ось и вставить обратно другим концом. Так же можно вставить в отверстие шестерни сверло 1,2мм и вращать пальцами. Перед сборкой нанесите на ось смазку. После сборки убедитесь, что механизм легко вращается.
Мы приносим извинения за эту проблему. Если вы не желаете самостоятельно разбирать сервомеханизм, то можете выслать его нам для бесплатного сервисного обслуживания. Мы не знаем, как часто эта проблема возникает. На всякий случай проверьте свои сервомеханизмы. Мы сейчас разбираем и проверяем все сервомеханизмы на нашем складе.
Процедура проверки продемонстрирована на видео.
Достигнут прекрасный результат с контроллером ZYX-GS V1.2. Процедура настройки предельно проста. Дополнительные гироскопы не требуются. Повторяемость при возврате камеры в заданную позицию составила 10 угловых минут.
На видео продемонстрированы три варианта конфигурации подвеса:
- Гироскопы Mini MEMS в режиме Heading Hold
- Гироскопы в режиме Normal и датчик вектора гравитации X-CAM
- Контроллер подвеса ZYX-GS V1.2
В данном случае 10 угловых минут – это не математическая точность отдельного датчика, а результат работы всего устройства целиком. В 8 случаях из десяти лазерный луч после короткого отклонения возвращался на прежнюю позицию с разбросом значений менее 0,15 градуса.
Результат близок к пределу дискретизации обычного сигнала управления.
Объяснение: если предел отклонения камеры установлен в интервале 90 градусов, а PWM сигнал управления оценивается с точностью 1024 шага, то получим точность заданной позиции в 5 угловых минут.
Тут демонстрация лабораторных измерений на ином прототипе:
Достигнут прекрасный результат с контроллером ZYX-GS V1.2.
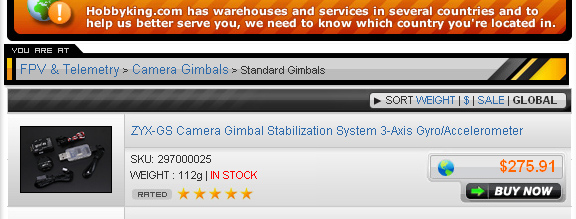
Осторожно, на HobbyKing цена завышена в два раза на этот контроллер.
Цена производителя 133 доллара:

Двойная цена на www.hobbyking.com - 276 долларов:
В последнее время сталкивался с проблемами при доставке из HobbyKing - отправки задерживают, номера прослеживания не прослеживаются. Достаквки занимают более месяца (обычная, регистрированная почта), но пока ничего не пропадало, что уже не плохо.
Здравствуйте господа. Являюсь обладателем ecilop в комплектации без обновления (без f servo) подвес стабилизируется посредствам Naza m1 и гироскопам Futaba GY520. Вот уже два года бьюсь с проблемой недостабилизации по оси ROLL F1. Подскажите во первых кто какой версией прошивки Naza пользуется был ли положительный результат по работе подвеса после перепрошивки и второй вопрос как вы справились с данной проблемой? Может у кого есть положительный опыт решения данной беды. Уже дикое желание опустить руки и просто от него избавиться, но жалко, ведь задумка шикарная.
Здравствуйте господа. Являюсь обладателем ecilop в комплектации без обновления (без f servo) подвес стабилизируется посредствам Naza m1 и гироскопам Futaba GY520. Вот уже два года бьюсь с проблемой недостабилизации по оси ROLL F1. Подскажите во первых кто какой версией прошивки Naza пользуется был ли положительный результат по работе подвеса после перепрошивки и второй вопрос как вы справились с данной проблемой? Может у кого есть положительный опыт решения данной беды. Уже дикое желание опустить руки и просто от него избавиться, но жалко, ведь задумка шикарная.
Еще этим летом летал в конфигурации Naza + GY520 на Ecilop Stereo. Версий прошивкок уже не помню. По оси Roll при наклоне вперед или назад градусов на 45 и больше могут возникать дрожания сервы Roll, но именно с GY520 это проявлялось меньше. Дрожания сервы больше раздражают сами по себе, но не так сильно сказывались на качестве видео. Для устранения дрожаний снижался гэйн гироскопа на оси Roll.
Вот этот ролик снят в такой конфигурации:
В обсуждениях иногда встречаю упоминания проблемы версии с F-servo модификацией, когда ZYX-gs как-то странно работает. У меня установки, показанные в описании, давали хороший реззультат и проблем с “однобокой” стабилизацией я не наблюдал. В качестве предположения - может нейтральное положение качалки потенциометра не соответствует нейтральному усилию сервы? Т.е. если подать нейтральный сигнал с приемника или серво-тестера, то пружины должны давать равное напряжение по обоим плечам (не вращать подвес). Если это не так, то надо либо поправить леску, либо повернуть потенциометр в зажиме. Что бы нейтральный сигнал не вращал полвес. Я это всегда проверял, возможно, по этому не сталкивался со странностями.
Алексей я не истользую F Servo у меня стоят только просто классические сервы без этих дополнительных блоков с лесками. А получается небольшое запаздывание отработки подвесом.
Алексей я не истользую F Servo у меня стоят только просто классические сервы без этих дополнительных блоков с лесками. А получается небольшое запаздывание отработки подвесом.
Инерционная стабилизация предполагает сохранение позиции. Запаздывание скорее говорит о том, что контроллер сперва транслирует ошибку, а потом ее устраняет.
Сложно лечить больного по фотографии, могу только предполагать… При полете в режиме GPS навигации я с NAZA получал не удовлетворительный результат (работает, но есть небольшие колебания и для “коммерческого” видео это уже не хорошо), но привык летать в ручном режиме и получалось плавно. А в каком режиме ваши полеты?
к стати, в клипе выше, тем где есть зависание на месте, использовался GPS режим и те самые колебания заметны. В ручном режиме идет плавнее
Коптер при этом даже не в воздухе, а у меня в руках. Допустим я наклоняю коптер вправо, при этом подвес на последнем сантиметре до стабильной позиции замедляется и медленно доходит. И так в обе стороны и вправо и влево как будто под конец подтормаживает или что ли смягчает доведение до конечной точки.
Инерционная стабилизация предполагает сохранение позиции. Запаздывание скорее говорит о том, что контроллер сперва транслирует ошибку, а потом ее устраняет.
Сложно лечить больного по фотографии, могу только предполагать… При полете в режиме GPS навигации я с NAZA получал не удовлетворительный результат (работает, но есть небольшие колебания и для “коммерческого” видео это уже не хорошо), но привык летать в ручном режиме и получалось плавно. А в каком режиме ваши полеты?к стати, в клипе выше, тем где есть зависание на месте, использовался GPS режим и те самые колебания заметны. В ручном режиме идет плавнее
Коптер при этом даже не в воздухе, а у меня в руках. Допустим я наклоняю коптер вправо, при этом подвес на последнем сантиметре до стабильной позиции замедляется и медленно доходит. И так в обе стороны и вправо и влево как будто под конец подтормаживает или что ли смягчает доведение до конечной точки.
Коптер при этом даже не в воздухе, а у меня в руках. Допустим я наклоняю коптер вправо, при этом подвес на последнем сантиметре до стабильной позиции замедляется и медленно доходит. И так в обе стороны и вправо и влево как будто под конец подтормаживает или что ли смягчает доведение до конечной точки.
Про NAZA могу только вспомнить, что там нехватало линеаризации. Тоесть если настроить точное значение при отклонении на 30 градусов, то при отклонении на 5 градусов было не точно. Я настраивал примерно на отклонении градусов 10.
Алексей а можно ли мне без f servo вместо назы использовать zyx-gs для отработки подвеса? Или только если поставить всю эту систему с лесками и фисервами?
Алексей а можно ли мне без f servo вместо назы использовать zyx-gs для отработки подвеса? Или только если поставить всю эту систему с лесками и фисервами?
Наза задает положение относительно рамы с моторами, а ZYX - относительно вектора гравитации прямо с подвеса. Безотносительно положения рамы работает именно F-servo.
Алексей подскажите если заказать у вас f-servo сложно ли их устанавливать и настраивать какие пружины к сервомеханизмам нужно ставить идут ли они в комплекте использовать хочу с tarot zyx-gs. По вашему мнению это удачная конфигурация и при этом мне не нужны уже гироскопы? Если заказать как долго будете высылать?
Алексей подскажите если заказать у вас f-servo сложно ли их устанавливать и настраивать какие пружины к сервомеханизмам нужно ставить идут ли они в комплекте использовать хочу с tarot zyx-gs. По вашему мнению это удачная конфигурация и при этом мне не нужны уже гироскопы? Если заказать как долго будете высылать?
В F-Servo обновлении есть маленькие пружины для натяжение лески. Из общего комплекта я использовал пружины 0,4N/mm.
Сложность установки проще всего оценить по фотографиям и по видео (для меня не выглядит сложно).
Если будете сами разбирать сервы DS8910, то аккуратно выталкивайте моторчик со стороны шестерни (пару человек сломали моторчики грубо вытягивая плату сервомеханизма с припаяным мотором).
устанавливая качалку, надо убедиться, что ей обеспечено свободное вращение в обоих направлениях (если не был вытащен ограничитель вращения - металлический штырек на последней шестерне).
Устанавливая потенциометры, надо убедиться, что в нейтральном положении подвеса они тоже находятся в нейтральном положении. Это проще всего сделать с сервотестером. Когда уже все установлено, надо держать подвес рукой и включить сервы. Пружины при нейтральном сигнале должны иметь равное растяжение и не вращать подвес. Если это не так, то нужно немного повернуть потенциометр в зажиме или перетянуть леску (леску можно протягивать через отверстия качалки, а после настройки зафиксировать суперклеем).
С ZYX-GS V1.2 настройка делается очень просто.
Высылаем в течении рабочего дня.
Видео дублировать не буду, оно тут уже выкладывалось в №403.