SteadiСopter

Подскажите пожалуйста как программировать регуляторы maytech 35a без карты программирования и какие значения стоит подрепетировать для исправления ситуации?
разобрал Эцилопа, поменял 401 гиры, собрал - стало лучше, но все равно склоняюсь к тому что для ИДЕАЛЬНОЙ настройки нужно арендовать спортзал взять ноут и убить пару часов на запись тестовых полетов при разных настройках с небольшим шагом, а потом сравнить видео и выбрать лучшее
Подскажите пожалуйста как программировать регуляторы maytech 35a без карты программирования и какие значения стоит подрепетировать для исправления ситуации?
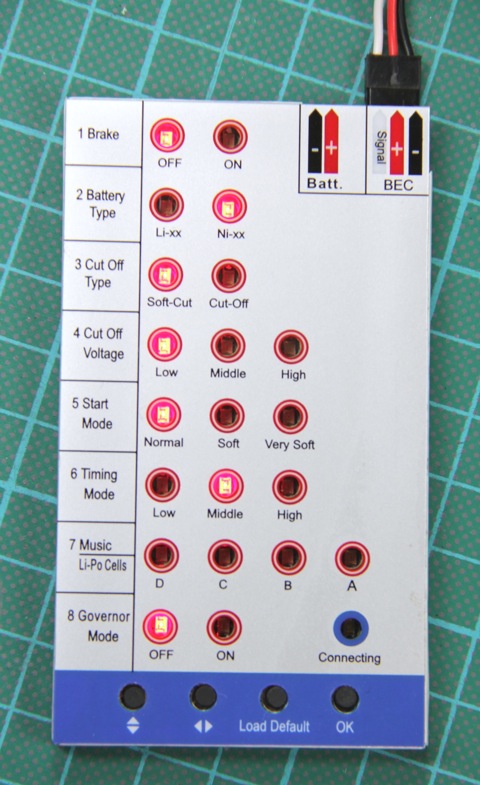
вопрос не по теме но отвечу. без карты смотри интсрукцию и считай бипы, что нужно поставить видно из фото. Кстати у тебя они с прошивкой SimonK поэтому тебе ничего менять не надо. Но SimonK может привести к срыву синхры на моторах блинчиках а у тебя именно такие. Я какое то время летал (без активного маневрирования) вообще без перепрошивки и программирования, потом от греха перепрошился на wiiESC и удалил BEMF конденсаторы
А что за гиры поставил?. У меня от вертолетной юности завалялись 611, но они конечно тяжеловатые заразы, хотя для эксперименУ хочу поставить .
разобрал Эцилопа, поменял 401 гиры, собрал - стало лучше, но все равно склоняюсь к тому что для ИДЕАЛЬНОЙ настройки нужно арендовать спортзал взять ноут и убить пару часов на запись тестовых полетов при разных настройках с небольшим шагом, а потом сравнить видео и выбрать лучшее
Все настройки подвеса осуществляются не взлетая. Единственное, что добавляет реальный полет - возможные вибрации от двигателей. Легкими толчками пальца можно раскачивать подвес и подобрать раекцию гироскопа (если речь идет о гироскопах). Наклоняя раму настраивается реакция NAZA.
А что за гиры поставил?. У меня от вертолетной юности завалялись 611, но они конечно тяжеловатые заразы, хотя для эксперименУ хочу поставить .
те же HK 401b - дешево и сердито но надо брать с запасом они часто дурят. делал мод - заливал термоклеем, новые 401 уже идут с виброраспоркой внутри
у меня завалялась футаба с маховиком она весит как кирпичь и жужжит ацки
прошло всего два месяца и я стал счастливым обладателем ЭЦИЛОПа. “спасибо” нашей почте 😦(( Хорошо хоть, что за это время посылка не повреждена
А еще спасибо, но уже настоящее Алексею и Юле, за то, что всегда поддерживали связь и даже выслали второго, но он тоже где-то затерялся на просторах нашей страны 😦 Жаль, что улетаю на неделю, собрать уже сейчас охота 😃
Господа а как насчет заморочиться по поводу чехла для переноски ecilop. Пошить удобный, легкий, компактный. В дно вшить фанерку и по всем сторонам вшить туристический коврик с карманами под акумуляторы, струмент. Если кого заинтересовала идея пишите кто что придумает, может у кого есть на заметке ателье, которые это делают. Давайте сконструируем и закажем пошив. Может у кого-то есть более интересные предложения?
Всем доброго дня, или вечера. На выходных удалось немного полетать в первый раз. Подвес пока не подключал, но на земле работает вроде нормально, хотелось сначала облетать сам квадрик. Вес снаряженного аппарата вышел с камерой 2400 г.( двигатели МТ3506(650кV), АРС 12Х3,8, NAZA, ОРТО 30А dji, 4s 5000 25c).
Gain вывел на крутилки на пульте, вроде бы настроил, но все равно должного отклика от квадрика получить не могу. При повороте вокруг своей оси квадрик теряет высоту, приходиться постоянно подправлять высоту газом, причем на удержание газа не 50%, а где то 60-70 % да еще и с запозданием, среднее время полета выходит 7-8 минут.
Такое впечатление, что мощности на этих пропеллерах или двигателях не хватает. На сайте Т-Motor по данному двигателю есть информация, что на 4s и пропах 12Х3.8 на 50% газа он тянет 560 г (rctigermotor.com/show.php?contentid=142).
Не подскажите у кого с какими двигателями и пропами были хорошие результаты в плане маневренности, меньшей вибрации и время полета?
Да и еще одна странная вещь произошла, при снижении коптера на высоте 1,5-2 метра произошел небольшой краш. Ни с того ни с сего резко перевернуло раму в лево в зубилом вниз. Просмотрел все на предмет плохого контакта или не затянутого пропа, все в норме. Что это было так и не понял.
Всем доброго дня, или вечера. На выходных удалось немного полетать в первый раз. Подвес пока не подключал, но на земле работает вроде нормально, хотелось сначала облетать сам квадрик. Вес снаряженного аппарата вышел с камерой 2400 г.( двигатели МТ3506(650кV), АРС 12Х3,8, NAZA, ОРТО 30А dji, 4s 5000 25c).
Gain вывел на крутилки на пульте, вроде бы настроил, но все равно должного отклика от квадрика получить не могу. При повороте вокруг своей оси квадрик теряет высоту, приходиться постоянно подправлять высоту газом, причем на удержание газа не 50%, а где то 60-70 % да еще и с запозданием, среднее время полета выходит 7-8 минут.
Такое впечатление, что мощности на этих пропеллерах или двигателях не хватает. На сайте Т-Motor по данному двигателю есть информация, что на 4s и пропах 12Х3.8 на 50% газа он тянет 560 г (rctigermotor.com/show.php?contentid=142).
Не подскажите у кого с какими двигателями и пропами были хорошие результаты в плане маневренности, меньшей вибрации и время полета?Да и еще одна странная вещь произошла, при снижении коптера на высоте 1,5-2 метра произошел небольшой краш. Ни с того ни с сего резко перевернуло раму в лево в зубилом вниз. Просмотрел все на предмет плохого контакта или не затянутого пропа, все в норме. Что это было так и не понял.
У назы барометр глючит от воздушных потоков с ротора, потому я не использую режим фиксации высоты. На форумах назы предлагают экранировать.
У меня тоже был похожий переворот (видео внизу). Предположительно - контроллеры двигателей дают глюк, но это только догадки. Достоверно причину переворачивания не установил. Теперь летаю с t-motor регуляторами, больше не переворачивался.
Обнаружил странность в таблице параметров на странице T-motors: www.rctigermotor.com/show.php?contentid=142
тут для APC13*4 указано меньшее потребление, чем для APC12*3.8 - такого не бывает. Сам последнее время испорльзовал 13*4, продолжительность не засекал, вроде 10 минут установленных на таймере вылетывает новрмально.
[QUOTE=Willi1;4072859]… Если Вы летали на назе-поробуйте подлетнуть немного на мануале-какой процент газа? Если выше 75-надо ставить большие пропы или повышать напряжение. Из-за этого бывают кувырки.
Если Вы летали на назе-поробуйте подлетнуть немного на мануале
Ну на счет “на мануале”, что то я очкую. Всего один раз попробовал еще на раме F450 и то не удачно.
То что газа не хватает, я и так чувствую. Думаю попробовать поставить пропы побольше.
Наверно лучше питч побольше,или напряжение повысить-будет стабильнее.
Подскажите, кто знает?
Задавал вопрос в ветке про подвесы на прямом приводе, никто не ответил.
Может-ли двигатель напрямую управлять положением стедикама, вместо пружинок и серв? Или с таким мощным моментом двигателей просто не существует?
Смысл? Если через пружины-то серва удобнее и компактнее,напрямую-сильнейший момент нужен…
Просто я был поражён насколько чётко и ровно держится подвес на прямом приводе, хочется чтобы стедикам на коптере так же стоял как влитой.
Самые большие двигатели видел от хоббикинга 4830, но видимо и их мощности не хватит.
А если не ставить целью поворот камеры за счёт наклона всего стедикама, а сделать снизу подвес, который и будет наклонять только камеру. Нижнюю часть сделать сознательно тяжелее, тогда мотору не нужно будет прилагать больших усилий для компенсаций. Мотору нужно будет приложить усилие лишь в начале и в конце горизонтального движения коптера, когда инерция будет отклонять стедикам из-за перевеса снизу.
… В том то и свойство стедика, что он стоит как влитой, а задача серв,пружинок, гироскопов, это не дать ему отклониться. Для прямого привода тут нужен очень большой момент, т.к. система обладает большим моментом инерции.
Подскажите плиз, установка контроллера не в центре, как то влияет на его работу?
Подскажите плиз, установка контроллера не в центре, как то влияет на его работу?
смотря какой контроллер, назе точно пофиг, остальные тоже не заметил какой либо разницы
Народ подскажите может кто использует с ecilop передатчик jr pcm9xii, проблема с организацией канала под управление чуйкой гироскопов. Подскажите как грамотно организовать каналы?
Подскажите как грамотно организовать каналы?
сервотестером 😃
сервотестером 😃
Предлагаешь сервотестер на борту таскать?
Вопрос был больше по настройке конкретной модели аппы и не совсем по теме
Аццкий юзерпик у тебя 😉