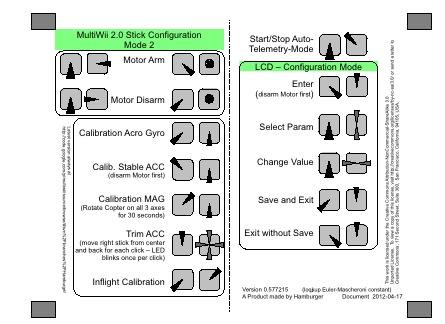
CRIUS ALL IN ONE PRO Flight Controller

Добрый день.
Случилась проблема у меня- перестала подключаться плата к компу, при подключении через UDB пишет что подключено неизвестное устройство, драйверы usb переустанавливал. сама плата работает норм, коптер летает, но комп его не видит…какие возможны варианты? usb сгорел?
Случилась проблема у меня- перестала подключаться плата к компу, при подключении через UDB пишет что подключено неизвестное устройство, драйверы usb переустанавливал. сама плата работает норм, коптер летает, но комп его не видит…какие возможны варианты? usb сгорел?
Для начала попробуйте кабель поменять.
Для начала попробуйте кабель поменять.
Кабель менял, не помогает, такое ощущение что дрова глючат или не хотят цепляться…но с чего им слетать тоже непонятно
Для начала попробуйте кабель поменять.
Все-таки это был кабель, поменял на еще олин короткий и все заработало, спасибо!
Подскажите пожалуйста, а что это за поведение GPS U-blox NEO-6 такое screencast-o-matic.com/watch/c2nDbUnIr9 ?
Подскажите пожалуйста по компиляции мегапирата.
Если хочу откорректировать углы согласно этому мануалу
moderndrones.com/…/how-to-configure-offset-frames-…
достаточно ли мне в файлике AP_MotorsQuad.cpp
В секции где описываются углы V-Frame квада заменить стандарные углы на мои
add_motor(AP_MOTORS_MOT_1, 62, AP_MOTORS_MATRIX_MOTOR_CCW, 1);
add_motor(AP_MOTORS_MOT_2, -133, AP_MOTORS_MATRIX_MOTOR_CCW, 3);
add_motor(AP_MOTORS_MOT_3, -62, AP_MOTORS_MATRIX_MOTOR_CW, 4);
add_motor(AP_MOTORS_MOT_4, 133, AP_MOTORS_MATRIX_MOTOR_CW, 2);
скомпилировать, залить, и потом в МП выбрать конфигурацию V-FRAME и эти углы применяться?
Или надо как указано жестко закреплять эту конфигурацию в APM_Config.h
#define CONFIG_APM_HARDWARE APM_HARDWARE_APM2
#define FRAME_CONFIG QUAD_FRAME
#define FRAME_ORIENTATION V_FRAME
Всем привет!
Прошу помощи, у знающих.
Залил мультивии, настроил согласно: multiwiifaq.ts9.ru/index.html
Провел калибровку esc. Заремил строку: //#define ESC_CALIB_CANNOT_FLY.
При подключении питания все вроде мигает, с пульта поступает сигнал, датчика реагируют на изменения положения платы.
Но ARM не производиться…
Проводил калибровку акселерометра с multiwiiconf (Colin acc).
Будьте добры, подскажите куда еще посмотреть, и что подкрутить… А то уж больно руки чешутся запустить свой первый квадр.
Но ARM не производиться…
То есть вы армете, но он не заводиться?
Проверьте тогда диапазон настройки каналов. Возможно просто не хватает расходов на пульте.
Здравствуйте товарищи радиолюбители. Хочу к вам обратиться в поисках истины. Заинтересовался квадриками и получив огромную дозу информации в свой мозг, недавно запустил свой первый аппарат. Мозг аиоп версия 2 с рцтаймера, аппаратура турнига 9х, прием передача HawkEYE на 433МГц от сюда: old.fpvmodel.com/433mhz-hawkeye-openlrsngtx-uhf-sy…
Плату прошил на последнюю версию пирата, сделал базовые настройки, запустил, но пока токо в хате. Летает, стабилизация, барометр, компас работает, ЖПС ловит. Кстати ЖПС такой: www.rctimer.com/product_984.html
И сам вопрос: Повез свое детище на первые испытания. Было около -8 градусов, ветра не было, ясно. Включил, ЖПСка начала искать спутники. Все шло по плану, пока не стал делать арминг, и тут мое чудо, решило поиздеваться, арминг не делается, подрубил квадр к ноуту, в итоге там увидел, что ни один из стиков не откликается, хотя приемник и передатчик видят друг друга. Пробовал всё перезагружать по всякому, ноль эмоций. В итоге, расстроенный поехал домой, и вот парадокс, по приезду, с порога решил включить проверить, и эта зараза заработала, хотя я ничего не делал, причем с пол пинка. И вот хочу у вас спросить, сталкивался ли кто-нибудь из вас с этим? Кстати забыл сказать, до испытаний заряжал аккум для пульта 3s 2.2 ампера, не может быть такого, что аппаратуре могло что-то в аккуме не понравится? Там же после полного заряда больше 12 вольт, до этого я аккум еще не заряжал, т.к. новый еще… Не могло пульту напряжение не понравиться? Спасибо. ))
один из стиков не откликается
Мороз и солнце… Тепло и холод… Роса, батенька! 😉
ни один из стиков не откликается, хотя приемник и передатчик видят друг друга.
а переключатели режимов тож не работали ?
или только стики ?
Ребята а как можно прошить без усб. У меня имеется ком порт вот такой: vk.com/veselkov222?z=photo35936263_318368046%2Fpho…. Ну или через блютуз как-нибудь. Усб не работает.
Taatarenkoff подскажите!
А как это посмотреть? У меня Turnigy 9x.
Как я понял расходы на моей аппе это E.POINT. Изменяя эти значения, добился значений расходов 1500 (в multiWiiConf).
Может что-то упустил…
Увы стоковую прошивку не помню. Но где-то рядом с выставлением центральных значений должны выставляться крайние значения.
Сколько в GUI показывает при мин и макс?
К примеру мин 1089, а мах 1901( это throt). Да в се стыки трестировал: мин 1100, и мах 1900.
Может на хомутал где-то. В подключении к плате?
пробуйте мин занизить ближе к 1000. Скорее в этом причина.
а переключатели режимов тож не работали ?
или только стики ?
Режимы тоже не работали. То есть все таки холод сыграл злую шутку… А куда лезть в аппаратуру или на контроллер смотреть? Я просто пробовал на балкон по отдельности выносить, замораживать, все работало…
То есть все таки холод сыграл злую шутку…
У меня так же было с Турнигой. Правда, на планере. Достал приемыш, благо он недалеко стоял, отогрел своим дыханием😇, все заработало. 😲Не могу сказать, что это панацея, может совпали какие- то еще факторы, но пару раз меня это спасало.
Ребята, напомните пожалуйста, прошивка 2.1 base, плата AIOP с RCtimer, куда воткнуть CPPM сигнал?
The following lines apply only for specific receiver with only one PPM sum signal, on digital PIN 2
Первый аппарат. Запутался.
У меня так же было с Турнигой. Правда, на планере. Достал приемыш, благо он недалеко стоял, отогрел своим дыханием😇, все заработало. 😲Не могу сказать, что это панацея, может совпали какие- то еще факторы, но пару раз меня это спасало.
Сегодня была вторая попытка испытаний, и она прошла удачно, как ни странно, хотя было холоднее на пару градусов и ветер был, но он работал, и без нареканий, с первого раза. Проверил несколько режимов: зависание, удержание высоты, возврат домой. Все работает. )) Может какой одноразовый глюк был… И дико извиняюсь, что совсем не по теме, хочу узнать, чтобы не рыться по форуму… Подскажите плиз, когда ставишь полет по точкам, и указываешь высоту точки, квадр ориентируется по точке взлета, или от уровня моря? Или по ЖПС? И еще такой щекотливый вопрос, летаю на аккуме 4S, если ставить функцию “возврата домой при севшем аккумуляторе”, какое напряжение оптимально, чтобы он успел долететь и сесть? Пока поставил 15 В. Огромное спасибо! ))
Ребята а есть способы прошивки без усб, Он оторвался или припаять можно? Имееться такой COM-PORT vk.com/veselkov222?z=photo35936263_318368046%2Fpho…