PIXHAWK PX4 Autopilot еще одна летающая железка

Короче, проводком соединили что-то около процессора, может его ногу и что-то внизу платы, залили места соединения компаундом, да так, что и на процессор попало. Чё за фигня, никто не знает?
У меня то же самое, брал на али у редитуская. Идет с какой то ноги процессора куда то к акселю MPU6000, который скорее всего у меня и глючит
Хотя, возможно, глючит и не он
А разница в газе для соосников так и не появилась ещё в новых прошивках?
Приехали из поднебесной модемы: 915мГц, 500 мВт. Перепаял под Pixhack коннектор,подключил,com port и скорость установил. Вроде бы нормально сконнектилось,в окне флай дата данные отображаются,горизонт и.т.д. А в окне Sik Radio-глухо,как в танке,жму кнопку Load Settings и получаю вот это:
Люди,может кто мучался уже или где-то это разжёвано-ткните носом или объясните где именно я туплю…😒
Приехали из поднебесной модемы: 915мГц, 500 мВт. Перепаял под Pixhack коннектор,подключил,com port и скорость установил. Вроде бы нормально сконнектилось,в окне флай дата данные отображаются,горизонт и.т.д. А в окне Sik Radio-глухо,как в танке,жму кнопку Load Settings и получаю вот это:
Люди,может кто мучался уже или где-то это разжёвано-ткните носом или объясните где именно я туплю…😒
Нужно работать с этим окном в состоянии Disconnected 😃
Люди,может кто мучался уже или где-то это разжёвано-ткните носом или объясните где именно я туплю…
Надо выбрать только порт. А коннект делать не надо. Вы этим заняли соединение.
Упс. Недочитал все сообщения.
Нужна помощь, не могу разобраться.
В прилагаемом логе ситуация: на третьей минуте в режиме Loiter коптер начинает заваливаться влево (на график выведены отмасштабированные: сигнал от пульта (RCIN1), ATT.DesRoll, ATT.Roll):
FAIL на ixbt.photo:
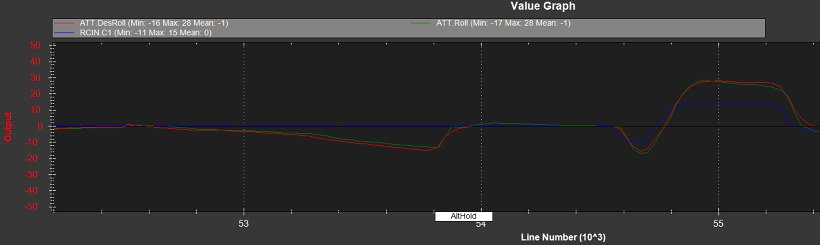
Почему-то контроллер начинает выдавать команду на моторы двигаться влево, причем крен продолжает расти. Я быстро переключаюсь в режим AltHold, коптер выравнивается.
Почему это происходит?
Судя по EKF у меня большие проблемы с магнетометром, но RAW данные что с первого, что со второго вроде консистентны.
Вибрации тоже в норме.
(коптер на раме 850мм, 4s, пропы 1755, 2кг полетная масса, pixhawk 3.3.2)
У вас маг уезжает в моменты газа и шим в питании. Я бы подальше удвинул силовые провода и в разъём пикса на 5В повесил маленький кондёр на несколько тысяч мкф.
на третьей минуте в режиме Loiter коптер начинает заваливаться влево
У Вас коптер в лойтере. При наборе высоты произошло смещение по координате. Пикс пытался восстановить установленную координату. А вот насколько это было правильно?
Вибрации тоже в норме.
Только что в норме, по нормам программистов.
У Вас коптер в лойтере. При наборе высоты произошло смещение по координате.
В реальности не было смещения, или по крайней мере не в ту сторону. А заваливаться он начал конкретно - видно как постепенно, медленно и неотвратимо растет крен. Я за ним такой глюк знаю, поэтому успел срочно до катастрофы переключиться в альтхолд, а раньше я просто движки вырубал.
У вас маг уезжает в моменты газа и шим в питании. Я бы подальше удвинул силовые провода и в разъём пикса на 5В повесил маленький кондёр на несколько тысяч мкф.
Вы думаете что просто глючит (со?)процессор? Или все-таки он на какие-то входные данные от датчиков так реагирует?
В момент начала завала уровень вибраций (vibe.VibeY, был в районе 5, вот вообще считай - нет вибраций)
А заваливаться он начал конкретно - видно как постепенно, медленно и неотвратимо растет крен.
Да, только это был командный завал. На Вашем графике видно, что рол четко выполнил команду.
А вот Х и DX, VelX и DVelX начали разбегаться. Хотя это как раз может была регистрация факта и нежелание пикса исправлять ситуацию. Тогда это конкретный глюк.
vibe.VibeY, был в районе 5, вот вообще считай - нет вибраций
Еще раз повторю. Это программисты так посчитали, а Вы уверенны, что пикс также считает. Пикс не программист ему считать приходиться в тяжелых условиях:).
Вы думаете что просто глючит (со?)процессор?
Получается серьезный глюк. При этом вроде жпс не виноват, аксели вроде работают. В общем ни по одному датчику проблем нет (нет ни одного признака), а завал идет. Остается сам процессор.
А там 3 причины. Вибрация (присутствует). Питание (шумное). Программный косяк. Тогда надо искать параметр типа АШРС-ЖПС-Гейн.
Считаете, что виноват параметр, тогда наверно придется перебирать.
Да, только это был командный завал. На Вашем графике видно, что рол четко выполнил команду. А вот Х и DX, VelX и DVelX начали разбегаться. Хотя это как раз может была регистрация факта и нежелание пикса исправлять ситуацию. Тогда это конкретный глюк.
Спасибо.
К таким же выводам пришел, получается что исходя из корректных данных пикс начал выдавать некорректные команды управления. Печально. Попробую на буржуйском сайте что-ниб выяснить.
Выручайте! Никак не могу завести моторы на пиксе. При включении питания они даже не пищат (при этом красные светодиоды на регулях светятся, но инициализация с проигрыванием мелодии не проходит).
Пикс подключен через ppm-энкодер. Реги - EMAX Simonk 40A. На регулях отрезаны плюсовые провода, т.к.раньше они работали с назой.
arming check отключен, кнопка safety switch - подключена. Газ в реверсе, настройка радио проведена. Сырые данные показывают, что показания газа передаются правильно (диапазон примерно 988-2010).
при попытке motor test - длинный зуммер, затем короткий, вращения нет.
Если каждый регуль цеплять по очереди напрямую в третий канал приемника - всё работает прекрасно. Пищат и калибруются так, как собственно и должны, при подъеме ручки газа - начинают адекватно вращаться. Такое чувство, что пикс все-таки передает регам не те крайние значения, которые нужны для успешной инициализации либо входа в калибровку.
Привет. Я в теме новичёк, подписался. Уверен, что такого ещё не было. Я разобрал его проверить, есть ли поролонка, она была. Но я обнаружил одну странность. Явно не заводская штука. Может ремонт? Короче, проводком соединили что-то около процессора, может его ногу и что-то внизу платы, залили места соединения компаундом, да так, что и на процессор попало. Чё за фигня, никто не знает?
один в один такая же фигня. И видимо - далеко не у меня одного.
Газ в реверсе
НЕ в реверсе конечно же. Опечатка.
Да, кстати, если заармить, данные на реги все-таки уходят, судя по графикам. Но вижу, что для входа в калибровку их недостаточно, до 2000 с копейками не доходит:
в общем, не знаю, как теперь откалибровать регуляторы и заставить их работать.
banggood.com/…/Emax-Simonk-Series-12A-20A-25A-30A-…
там красным по белому написано, что эти реги НЕ работают с пиксом. Вот такая вот печаль.
всё-таки победил я их) указанные детали на регах следует выпаять. Может поможет кому)
И чем они помешали пиксу?
И чем они помешали пиксу?
понятия не имею. Но решение которое описал выше (оно следует из переписки с техподдержкой EMAX) - на самом деле и не решение вовсе, как убедился. Да, моторы начали пищать, но как не калибровались через пикс, так и не калибруются нифига. Более того, появился другой глюк под названием “вечная калибровка” при выдернутом из 3-го канала газа приемника или вставленном в пикс сигнальном разъеме.
резистор с конденсатором - судя по всему, подтяжка. Ситуация один в один описана здесь, только там вроде бы проблема решилась полностью: diydrones.com/…/getting-pixhawk-to-work-with-emax?…
долбаный писюкак, с назой проблем не было вообще - воткнул, отстроил за двадцать минут, и проблем не знал. Так нет же, обсмотрелся видосов от олли, и зачесалось в одном месте.
почему пикс так погано ведет себя с емаксовскими регами - непонятно, мнения расходятся. Одни пишут что дело в модифицированной симонковской прошивке, другие - в том. что мощность сигнала, снимаемого с пикса недостаточна для корректной работы регулей, третьи - что пикс слишком долго стартует, и у регов кончается период ожидания входящего сигнала. И решения предлагаются разные, из которых самое экзотическое - добавление в схему 74HCT244. Кому-то это удается, кому-то нет.
зачесалось в одном месте
И купили самый дешёвый и непонятный регуль какой только нашли
И купили самый дешёвый и непонятный регуль какой только нашли
вот уж на регули гнать не надо, сами по себе они довольно надежны и безглючны, и даже пайка у них в полном порядке, чего не скажешь о других дешевых аналогах. С назой всё работало настолько стабильно, что можно было на том и остановиться. Более того, на апм, cc3d и прочем таких проблем как с пиксом у этого регуля не наблюдалось, и беглое гугление это подтверждает.
А гемороя можно хапнуть и с “дорогущими и понятными” регуляторами. Назоводы давно ведут в гугл докс таблицу совместимости регуляторов, которая постоянно пополняется. Ссылку к сожалению не помню.