Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

В итоге нашел на ХК, выход 12v 3a вход2-5s
Баддиссылка со скидкой
www.hobbyking.com/buddy.asp?code=923D2AC3-B89D-45B…
Почему подвес не реагирует на изменения пидов? Прошивка alexmos, gui 2_2d2
ломанный
Это возможно исправить? На некоторые другие команды он реагирует
Подскажите - где взять одноосевой контроллер? предполагается на Яв…
Товарищи, прошу помощи. Приобрел на aliexpress дешевенький подвес для камеры вот такого типа:
Как позже выяснил когда начал разбираться, сделан он на основе пиратской версии alexmos (да стыдно)
Так вот проблема в том, что при отсутствии ветра работает практически идеально, но стоит появиться небольшому ветру или же самому квадрику начать быстро перемещаться, то начинает дико дергаться камера по питчу. Уже какие только настройки не пробовал, и PWM прибавлял и PID увеличивал при уменьшении PWM, ситуация остается примерно одинаковая. Камера Xiaomi Yi, по формфактору аналогична GoPro.
Что может быть с ним не так? Что еще можно подкрутить? Или стоит что-то заменить в нем? Двигатели или контроллер оригинальный поставить например?
Что еще можно подкрутить
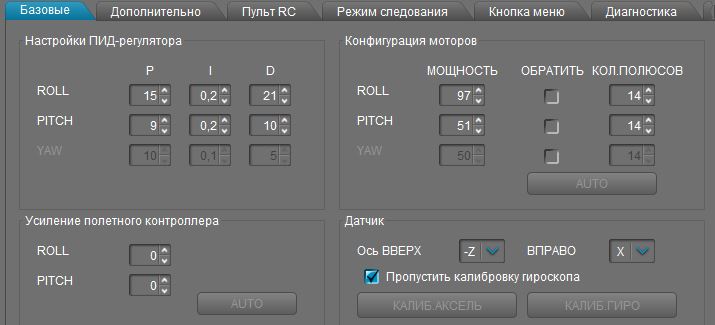
вот так у мну стоит
А при чем тут управление? Проблема даже без подключенных сигналов управления. А какие настройки базовые стоят? Подвес такой же прям? Стабильно работает?
Стабильно работает?
Да, стабильно
исправил, прошу пардонить
Товарищи, прошу помощи. Приобрел на aliexpress дешевенький подвес для камеры вот такого типа:
Как позже выяснил когда начал разбираться, сделан он на основе пиратской версии alexmos (да стыдно)
Так вот проблема в том, что при отсутствии ветра работает практически идеально, но стоит появиться небольшому ветру или же самому квадрику начать быстро перемещаться, то начинает дико дергаться камера по питчу. Уже какие только настройки не пробовал, и PWM прибавлял и PID увеличивал при уменьшении PWM, ситуация остается примерно одинаковая. Камера Xiaomi Yi, по формфактору аналогична GoPro.
Что может быть с ним не так? Что еще можно подкрутить? Или стоит что-то заменить в нем? Двигатели или контроллер оригинальный поставить например?
попробуй сначала движки помощнее поставить. Потом плату меняй. Не надо экономить на кондомах. Слабые движки - 50% проблем!
А есть какой-нибудь FAQ по движкам для подвесов? А то что-то не смог найти какие вообще выбирать.
А тему читал про свой подвес? rcopen.com/forum/f107/topic391523
Если развесовка подвеса-камеры идеальная, то и такие движки должны тянуть. Питаешь 3S?
Можно ли перепрошить плату на которой изначально была залита ломаная прошивка alexmos?
Нет, убьешь загрузчик и привет
А как вообще прошить на более свежую версию? у меня постоянно ругается…
А есть какой-нибудь FAQ по движкам для подвесов? А то что-то не смог найти какие вообще выбирать.
Не встречал информацию такую. По опыту знаю и смело напишу: Если камера весит Х- грамм, то надо брать движки которые могут потянуть Х2-Х3 веса камеры. т.е. с запасом. Впритык смысла брать нет. Моторики Ваши возможно и выдержат камеру, но если вы будете ей пользоваться в сухопутном варианте. В полетном же, нагрузка идет НААААААмного больше, поэтому надо запас. Чтобы не быть голословным, лично у меня была такая же проблема с моторами. Сейчас стоят hercules gb4006 90t с камерой гопро. Ставил 5208 моторы! Они тяжеловаты и для более больших камер - держат намертво!!! Где-то лежат моторики от похожего подвеса жёлтого цвета. Вроде держат. Могу поменять на бак бензина в мою авто. Если надо, приезжай. Я рядом 😃
Что может быть с ним не так?
Всё с ним “в порядке”. ПЕРЕД настройками, камера должна быть отбалансирована так, как пропеллер на магнитном балансире : в какое бы положение не поставил - она в этом положении остаётся при НЕ подключённом к напруге подвесе. По двум осям , естественно.
(Со-ри за офтп)
у меня подвес dys для прохи ,прошивка 2.40 b7 алексмос. подключаю приемник в два входа на подвесе RC_pitch и RC_roll .вернее подключаю только к рс питчу ни какой реакции . а когда подключаю в разьем RC_roll на подвесе то можно назначить что то одно или питч или ролл или яв. подумал что возможно RC_pitch разьем не исправен. Или все таки почему на вкладке программы Алексмос только “режим входа RC_roll” и все? а режима питч нет -а на плате есть .В общем может у кого подключен приемник к подвесу и идет управление по нескольким осям-сбросит скрин с подключением. приемник обычный 6 канальный
P.S может быть сделать на серво провод разветвитель чтоб к подвесу подключить только в RC_roll а к приемнику сразу в два канала? Очень нужно чтоб с аппы можно было по яву поворачивать и наклонять камеру-а не только что то одно
вот так в программе выглядит
Или все таки почему на вкладке программы Алексмос только “режим входа RC_roll” и все? а режима питч нет -а на плате есть .
1.есть 4 входа (для 8битки), есть оси, и что куда перенаправляется выставляется во вкладке пульт RC, а что приходит на входы можно смотреть во вкладке диагностика.
2 для питания приемника от платы алексмос, надо поставить перемычку по питанию, если приемник имеет свое отдельное питание, то перемычку убрать
3 спокойнее работать в инкрементном режиме, а не в пропорциональном.
4 бывает на платах не правильная маркировка входов FC и RC
5 если ломаная пиратка, то может не корректно работать
Опять я со своим 32х-битным утопленником. Обнаружил, что на плате нигде нет 3.3 вольта - ни на процессоре, ни на выходах. 5 есть, а 3.3 нет.
Подскажите, где у меня на плате преобразователь на 3.3 вольта? Вот тут ссылка на фото.
Спасибо!
есть 4 входа (для 8битки), есть оси, и что куда перенаправляется выставляется во вкладке пульт RC
на подвесе питание подает питание на приемник. первый порт на подвесе Rc_pitch второй RC_roll , на порте RC_roll получается настроить все что угодно(питч,рол,яв) как только подключаю провод к порту RC_pitch начинаются глюки подвес трухает ,крутится вокруг оси–только все выключение и калибровка приводит в нормальное состояние.а так работает вроде нормально(на столе–в воздух еще не поднимал) . На счет
и что куда перенаправляется выставляется во вкладке пульт RC
Это значит что могу еще один канал с приемника подключить не в глючный RS_pitch, а в какой то из FC_roll или FS_pitch верно я понимаю?
очень нужно управлять не только по питчу но и по яву.