Walkera QR-X350 Pro

при подключениик коптеру и ОSD и радиомодема, на видеоэкране все значения получаю ноль. Стоит только отключить радиомодем - все значения восстанавливаются.
Из-за чего может быть конфликт?
При подключении модема в планшет, в дроид планнер, он коннектится, зеленый диод горит постоянно, т.е. связь есть.
Но ничего более сделать нельзя. Никаких данных он не получает и не передает.
Нет у вас связи. Красный должен мигать, подтверждая передачу и обмен пакетами.
Так-с. В МП все-так подключился.
Нужно выбрать правильный порт, и НЕ нажимать на вилочку “connect”. А на вкладке 3DRadio нажать Load Settings. Если радиомодем на коптере включен, то в МП считаются настройки с модема-мастера, и модема-слейва. Тут же и выставляется мощность передатчика.
Нет у вас связи. Красный должен мигать, подтверждая передачу и обмен пакетами.
Когда в DP нажимаю connect, начинает с постоянной амлитудой мигать красный диод. Все данные телеметрии при этом по нулям, горизонт не работает.
Если отсоединяюсь, красный диод тухнет, а на видеоэкране No MAV DATA.
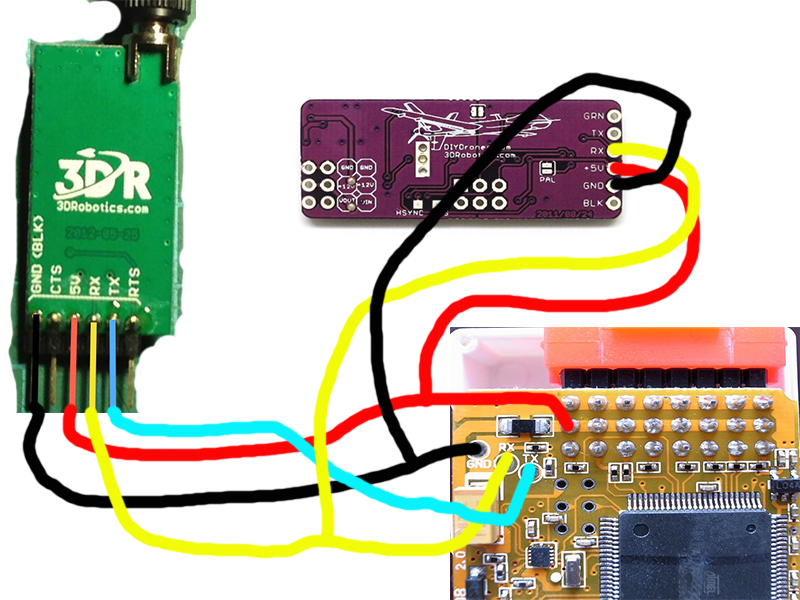
Подключал все по этой схеме.
Ну вот, вернулся я из своего 2-х недельного отпуска… а на почте меня ждал новый контроллер! Это конечно хорошо, однако… В общем, собрал я наконец-то коптер, попробовал полетать с GPS u-blox-7M. Кошмар! Вообще, как будто нет никакого GPS. Вот тебе и двухсистемный. Уносится в сторону, притом каждый полёт в произвольную. Вернул “родной” u-blox 6M. Стало лучше, но не намного. Коптер при включении удержания исполняет “унитазинг”. То есть, начинает носиться вокруг точки удержания кругами с возрастающим креном. Упал, сломал ногу с компасом… Зла не хватает! Временно отменяю полёты (пока злиться не перестану).
Купил другую модель, подешевле ( за 19$). Вот это вещь! И летает классно и никаких заморочек.
А что говорит МП?
Если отсоединяюсь, красный диод тухнет, а на видеоэкране No MAV DATA.
А не попутаны ли у вас rx tx? Посмотрите в wiki правильную рукописную схему подключения. Она отличается от стандандарта в APM.
А что говорит МП?
МП говорит, что всё в порядке. Похоже, компасс некачественный попался. Надо попробовать заменить вместе со сломанными ногами…
А не попутаны ли у вас rx tx?
Как написал постом выше, все делал по той схеме. Перепутать сложно, синий провод с радиомодема, подключил к одинокому проводу припаянному в контроллере к ТХ.
Так-с. В МП все-так подключился.
Нужно выбрать правильный порт, и НЕ нажимать на вилочку “connect”. А на вкладке 3DRadio нажать Load Settings. Если радиомодем на коптере включен, то в МП считаются настройки с модема-мастера, и модема-слейва. Тут же и выставляется мощность передатчика.Когда в DP нажимаю connect, начинает с постоянной амлитудой мигать красный диод. Все данные телеметрии при этом по нулям, горизонт не работает.
Если отсоединяюсь, красный диод тухнет, а на видеоэкране No MAV DATA.Подключал все по этой схеме.
Без включенной аппаратуры данные не передаются. Аппаратура включена? Парамнтры настроек двух радиомодулей должны мыть одинаковыми.
Неудачей закончился эксперимент с приемником RX705. В нем также замыкается шим на пятом канале при потере сигнала. Спрашивал коллег из ветки по TALI. А жаль. В 1002, 1201 и 1202 приемниках нет sbus.
Правда там мнения немного разделились. Надо третьего оппонента.
Подключал все по этой схеме.
А не попутаны ли у вас rx tx?
Без включенной аппаратуры данные не передаются. Аппаратура включена? Парамнтры настроек двух радиомодулей должны мыть одинаковыми.
Ну что ж господа, как бы там ни было на схемах, подключил к радиомодему сигнальные провода наоборот, т.е. RX-TX, TX-RX. И все заработало!
Полетные режимы определяет, телеметрию получает, вольтаж показывает и т.д.
И собственно OSD тоже заработало.
Дабы не было сомнений в правильности подключения, у меня к модему шел родной шлейф проводков которые по цветам такие же как на рисунке выше. И неправильно их не воткнешь.
И получилось что синий проводок модема (TX) я подключил к каналу RX контроллера.
А жаль. В 1002, 1201 и 1202 приемниках нет sbus.
Неужели Вам действительно так критичны дополнительные 4 грамма, чтоб подключить все несколькими проводами, а не одним?
У меня RX1202 подключен на все возможные каналы (8) к контроллеру четырьмя сервопроводами.
Кстати попробовал только что в комнате, ПРОха с гоупро, с G-2D железным, с родным большим аккумом, с пищалкой по вольтажу, с телеметрией и радиомодемом, с передатчиком на 600mW взлетает на 55% газа.
И собственно OSD тоже заработало.
Неужели Вам действительно так критичны дополнительные 4 грамма, чтоб подключить все несколькими проводами, а не одним?
4 грамма не жалко. Важна изящность решения. Это также как пользоваться или не пользоваться круизконтролем на автомобиле или носить или не носить дорогое нижнее белье.
У вас 3dr какой? Дайте пожалуйста ссыль.
Антенны не проверяли свои? Стоит проверить, действительно ли они на 433мгц.
Узнаем в полете 😃
Ну вот, вернулся я из своего 2-х недельного отпуска… а на почте меня ждал новый контроллер! Это конечно хорошо, однако… В общем, собрал я наконец-то коптер, попробовал полетать с GPS u-blox-7M. Кошмар! Вообще, как будто нет никакого GPS. Вот тебе и двухсистемный. Уносится в сторону, притом каждый полёт в произвольную. Вернул “родной” u-blox 6M. Стало лучше, но не намного. Коптер при включении удержания исполняет “унитазинг”. То есть, начинает носиться вокруг точки удержания кругами с возрастающим креном. Упал, сломал ногу с компасом… Зла не хватает! Временно отменяю полёты (пока злиться не перестану).
Купил другую модель, подешевле ( за 19$). Вот это вещь! И летает классно и никаких заморочек.
А он биндится с DEVO 10?
И еще один вопросик - сколько физических каналов связи в ресивере 703А?
семь
Узнаем в полете 😃
Можно и в доме понять. Зайдите в другую комнату, если RSSI резко упадёт- значит фуфел.
Можно и в доме понять. Зайдите в другую комнату, если RSSI резко упадёт- значит фуфел.
Проверим.
Но при плотном захвате антенны рукой, сигнал со 100% падает до 98%.
семь
а почему MP видит все 8 независимо?
Испробовал только что на улице, все очень круто.
Режим Guided порадовал, работает идеально. Circle так и не работает нихрена.
А вот PosHold кажется начал работать. По крайней мере при включении он определяется, и на стик наклона практически не реагировал.
Но уже было темно и батарея заканчивалась, поэтому точно пока не скажу.
И не вдуплил где включается Follow Me, в дроидпланнере нет такого режима 😦
а почему MP видит все 8 независимо?
интересно, как Вы ими управляете, если пульт тоже дает управление только по 7 каналам?
Испробовал только что на улице, все очень круто.
Режим Guided порадовал, работает идеально. Circle так и не работает нихрена.
А вот PosHold кажется начал работать. По крайней мере при включении он определяется, и на стик наклона практически не реагировал.
Но уже было темно и батарея заканчивалась, поэтому точно пока не скажу.И не вдуплил где включается Follow Me, в дроидпланнере нет такого режима 😦
интересно, как Вы ими управляете, если пульт тоже дает управление только по 7 каналам?
Это ты возле клеверного летал?