Hubsan X4 FPV H501S - FAQ, инструкции, прошивки, модернизации

H501A-FC-V1.1.35
На H501S уже прошла испытания, винты не ломает?)
Изменили константы калибровки компаса. Теперь максимальная разница в дельте 700 вместо 500 по всем осям, а
абсолютное значение по оси X и Z не должно превышать 2100, по оси Y не должно превышать 2200 вместо прежних 2200 по всем осям.
Ждал-ждал я новости тестеров о прошивке 1.1.35. И не дождавшись взял и сам попробовал и не пожалел. Стояла у меня прошивка 1.5.25 которая меня и так устраивала с ней и буду сравнивать.
Последовательность действий:
- Из под win10. Используя программу HUBSAN FC Tool V3.exe, ту что шла в архиве вместе с прошивкой, я установил для начала прошивку 1.1.11, т.к. программа отказалась мне показывать мне мою текущую версию
- Заново переподключил квадрик и перезапустил программу.
- Установил прошивку H501A-FC-V1.1.35.hbs.
- Используя программу для изменения параметров внутри квадрика, я проверил параметры высоты , высоты возврата и т.п. Все значения оказались стандартными как и раньше.
- Убрал ограничение по высоте, и поставил высоту возврата 25 м.
- Сохранил. И все закрыл и отключил.
- Проверил прошивки на пульте и провел калибровку компаса. Остальное не стал калибровать.

Теперь про полеты:
1.Квадрик откалибровался как и на прошивке 1.5.25 за 2 оборота в горизонте и 2 оборота носом вниз. - Спутники нашел быстро так же как и на 1.5.25.
- Проверил FM – работает
- Проверил RTH, он набрал высоту 25 метров и тут как уже не чудно он полетел носом ко мне!
- А теперь НОВОСТИ: ПРИ ВОЗВРАТЕ ДОМОЙ СОХРАНЯЕТСЯ УПРАВЛЕНИЕ ПО РУДЕРУ. Можно возвращаться домой теперь любым боком. При полете если резко менять направление квадрик немного колбасит, но он потом выравнивается. Тестировал несколько раз. Если дергать стики в самом начале то он никуда не летит, ждет пока я успокоюсь и тогда он повернувшись ко мне лицом полетит, только тогда можно выставить направление. Получается разрабы объединили HM, FM и RTH в одну гипер функцию RTH.
Попробовал еще полетать в GPS,MM, AM все хорошо и так же как в 1.5.25. Только есть одно но: был сильный ветер и квадрик в GPS вел себя как когда в АМ на большой скорости пытаешься затормозить. Он в GPS при резком маневре и сильном ветре стал набирать высоту. Ну думаю это не плохо, просто к этому надо быть готовым.
Вот и все. Кто поставит лайк, тот дедушка.
P.s. Circle fly не работает
Проверил RTH, он набрал высоту 25 метров и тут как уже не чудно он полетел носом ко мне
Но вот почему то у меня возврат заканчивается унитазищем на подлете к точке снинижения,можт надо было с откатом тоже заливать???Тогда не будет безлимита высоты который остался от 1.5.25,потму как HUBSAN FC Tool V3.у меня не хочет ни в какую работать.
- А теперь НОВОСТИ: ПРИ ВОЗВРАТЕ ДОМОЙ СОХРАНЯЕТСЯ УПРАВЛЕНИЕ ПО РУДЕРУ. Можно возвращаться домой теперь любым боком.
Я вот ещё смотрю они констант каких-то напоменяли. Было 90, стало 100, было 30, стало 50. Осталось разобраться что именно напоменяли.
А ещё поменялась процедура автодизарма (по превышению угла и т.д.).
Появились какие-то новые счётчики и теперь эта процедура при каки-то условиях (надо разобраться) не только может дизармить дрона,
но и обратно его заармить.
ДРУЗЬЯ, ХОРОШ ОФФТОПИТЬ В ЭТОЙ ВЕТКЕ!
Ждем теперь от Олега утилиту настройки с поддержкой FC 1.1.35 😃
P.s. Circle fly не работает
Думаю Circle Fly не заработает пока не выйдет новая прошивка RX под S-ку.
ДРУЗЬЯ, ХОРОШ ОФФТОПИТЬ В ЭТОЙ ВЕТКЕ!
Ждем теперь от Олега утилиту настройки с поддержкой FC 1.1.35 😃
Предлагаю Олегу сделать программу настройки универсальной для любой версии прошивки.
Для этого нужно найти в файле прошивки сигнатуру 0x01, 0x00, 0x69, 0x5A.
Она всегда присутствует в конце блока с параметрами. Блок с параметрами занимает ровно 200 байт.
Если из смещения после сигнатуры 0x01, 0x00, 0x69, 0x5A (адреса следующего за ней байта) вычесть
размер блока (200 байт), то получим смещение (адреса) начала блока с параметрами
(где лежит самый первый параметр EP_RC_CHMiddle_P).
В прошивке 1.1.35 достаточно много всяких мелких изменений, подгонок констант. Некоторые значения вернулись
к пержним, которые были в прошивке 1.5.25. Основные изменения, как я понял, коснулись режима возврата домой и
весьма заметно изменился алгоритм обработки критических углов дрона. Ещё не вникал, но что-то они там расширили,
появились ещё дополнительные счётчики, появилось возможность автоматического арма задизармленных моторов.
Отпишитесь плиз кто мерил максимальную скорость в новых прошивках в режимах AM, GPS и RTH !!! Жалко нельзя задать параметр скорости в AM…для экспериментов на предмет жора аккума при разных скоростях.
Выяснил причину вылета при запуске утилиты H109Tools10 (насколько помню, такое было не только у меня) - нужно установить Framework 4.5.2.
На стандартном пульте вывод 3 пин jack 3,5 мм . Распиновка:

Для FPV2:
Дайте, пожалуйста, ссылку на ТХ 4.2.14
Добрый день! Подскажите мне пожалуйста, модель H501C от модели H501S только пультом отличается? У меня модель 502E. Управляется легко, в целом нравится, кроме камеры, моторов и времени полета. Хочу взять б/у 501S. И собственно вопрос - будет ли дрон 501s биндиться с аппаратурой 502e? Чтобы получилась модель 501С) Надеюсь понятно сказал) СПАСИБО!
H501C от модели H501S только пультом отличается?
Еще на Сшке нет передатчика 5.8 FPV/
Фото видео платы со всех сторон. Для поиска места подключения микрофона.
drive.google.com/open?id=0BzDzhsjae9gtbHh4Wjc3OUcy…

интересно что это за контакты? два маленьких не подписанных
Народ, компас как должен стоять в корпусе? Обязательно строго горизонтально? Почему спрашиваю: залез проверить какой у меня стоит компас и обнаружил, что один крепёжный винт был не закручен до конца. Плата компаса возможно стояла под углом к горизонту. А возможно и вообще болталась из-за люфта.
Что за контакты не понятно, а вот другие четыре площадки это интересно.
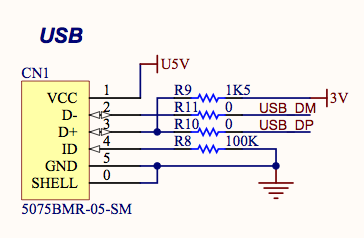
Похоже, что это контакты для подключения к USB-порту.
Контакты USB:
GND - земля
DP - D+
DM - D-
VBUS - скорее всего +5В питания платы (при питании от USВ)
ID - определение режима
Схема подключения по типу такой:


Кроме того промаркированы выводы TX, RX.
Это явно последовательный TTL-порт (UART).
Туда можно подключиться терминалом и посмотреть что плата туда выдаёт.
Через USB в плату наверняка заливается прошивка, возможно есть доступ к SD-карте
и, может, к каким-нибудь служебным файлам с настройками.
Добрый день. У меня возник вопрос по прошивке на высоту выше 250 метров. Какую прошивку использовать? У меня хапсан с про пультом.
Вот моя прошивка
H906A V1.1.6
501SS v2.1.16 V1.1.29
Буду рад любой помощи!
Это надо программу запускать в которой можно менять параметры полёта.
Через USB в плату наверняка заливается прошивка, возможно есть доступ к SD-карте
и, может, к каким-нибудь служебным файлам с настройками.
По отзывам пользователей Экшн камер, очень трудно найти оригинальную прошивку подходящую для твоего чипа. Поставив раз не родную, потом экшн камеры умирают.
Для того чтобы зайти в режим чтения карты или использования как веб камеру, надо нажать соответсвующие вкладки в выпадающем меню на экшн камере, если такого интерсфейса нет, то после подключения USB кабеля ничего не произойдет. Может за это отвечает контакт ID.
Примечания ИМХО:
- Со стороны радиомодуля: Квадратная площадка с четырьмя контактами просто площадка для подключения минуса для внешних подключаемых устройств.
- Со стороны Видеочипа: Плата разделена на две половины, там где VBUS контакт это сторона “+”, там где маркировка нанесена это сторона “-”
Это все лирика. Где микрофон?
Это все лирика. Где микрофон?
Даташит надо по SPCA6330A. При чём не тот, где две странички, а нормальный с распиновкой и описанием чипа. Пока не нашёл.
Немного про переменные хранящиеся в EEPROM.
Начнём с гироскопа.
EP_GyroBiasX - калибровка (смещение нуля) гироскопа по оси X
EP_GyroBiasY - калибровка (смещение нуля) гироскопа по оси Y
EP_GyroBiasZ - калибровка (смещение нуля) гироскопа по оси Z
EP_GyroBiasT - температурное смещение (калибровка) датчика температуры гироскопа которое вычитается из показаний термометра
EP_GyroTempDriftX - коэффициент масштабирования температурного смещения по оси X
EP_GyroTempDriftY - коэффициент масштабирования температурного смещения по оси Y
EP_GyroTempDriftZ - коэффициент масштабирования температурного смещения по оси Z
Т.е. нормализованные значения показаний гироскопа вычисляются следующим образом:
GyroX_normalized = (EP_GyroBiasX + GyroX * 100.0 + (Termometer - EP_GyroBiasT) * EP_GyroTempDriftX / 100.0) * EP_GyroScaleX / 10000.0
GyroY_normalized = (EP_GyroBiasY + GyroY * 100.0 + (Termometer - EP_GyroBiasT) * EP_GyroTempDriftY / 100.0) ********* EP_GyroScaleY / 10000.0****
** GyroZ_normalized = (EP_GyroBiasZ + GyroZ * 100.0 +** (Termometer - EP_GyroBiasT) * EP_GyroTempDriftZ / 100.0) ********* EP_GyroScaleZ / 10000.0********