FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

3M Dual Lock липучка хорошая идея для крепления батарейки?
Стоит не мало, но по описанию агонь
3M Dual Lock липучка хорошая идея для крепления батарейки?
буквально несколько дней назад о нём писали, но здешним поиском х. что найдёшь. в общем отзыв был положительный, со временем правда цепкость теряется
Стоит или нет переходить на что-то более быстрое чем Naze32 6DOF.
Конечно стоит. На ф1 сейчас только дронозавры летают😆
не могу не поделиться
banggood.com/Eachine-ET200R-FPV-5_8G-40CH-200mW-Mi…
помойму тут не было, et200 с рейсбандом,
мой любимый видеопередатчик, который кстати продержался дольше всяких FT997 за 30 баксов.
raceband есть, кушает до 24в, даже 5в на выход есть. И все добро за 18 долларов.
не могу не поделиться
www.banggood.com/Eachine-ET20...p-1022303.html
помойму тут не было, et200 с рейсбандом,
Почти такой же, но в полтора раза дешевле: ru.aliexpress.com/item/…/32620490889.html?smToken=…
Автор видео утверждает что это лучшие настройки народной камеры HS1177.
PS FrSky X4RSB c fpvmodel в руки через 10 дней. Очень быстро.
помойму тут не было, et200 с рейсбандом
Было и неоднократно.
У меня такие есть. Очень неплохие, но есть нюанс - у всех вместо 5в на выходе что-то в районе 4 вольт. ET600 или ET600R чуть побольше, но такой проблемы лишен
Почти такой же, но в полтора раза дешевле
Переключение каналов дип-переключателями, да нууу… 😃
Автор видео утверждает что это лучшие настройки народной камеры HS1177.
Записал его настройки на листочек, по аналогии с классическими, но для IR-Sensitive камеры. В скобках значения по умолчанию:
Exposure:
Shutter speed: Auto (Auto)
Brightness: 065 (042) - range seems to be 22 to 65
AGC: Off (Middle)
DWDR: On (Off) - Most important
Level: 063 (063)
White balance: AWC-SET: point on white paper in a sunny day (ATW1)
Day and night: Color (Auto)
Image adjust:
Contrast: 100 (149)
Sharpness: 031 (026)
Display: LCD (CRT)
Gamma: 0.50 (LCD 0.45 CRT -)
Ped level: 025 (LCD 017 CRT 016)
Color gain: 220 (LCD 176 CRT 160)
А вот классические:
Exposure:
Shutter speed: Auto (Auto)
Brightness: 065 (042) - range seems to be 22 to 65
AGC: Off (Middle)
DWDR: On (Off) - Most important
Level: 063 (063)
White balance: ATW1 (ATW1)
Day and night: Color (Auto)
Image adjust:
Lens Shade: On (Off)
Level: 80 (22)
Contrast: 105 (149)
Sharpness: 028 (026)
Display: LCD (CRT)
Gamma: 0.45 (LCD 0.45 CRT -)
Ped level: 050 (LCD 017 CRT 016)
Color gain: 250 (LCD 176 CRT 160)
Как видно, основная разница в функции Lens shade. Для IR-Block камеры эти настройки тоже отлично подходят, просто нужно Color gain ставить 180-220 (по вкусу) вместо 250. Также он использует ручной баланс белого, выставленный по листу бумаги в солнечный день. Меня устраивает работа ATW1 режима, можно летать в любую погоду не залезая в настройки камеры.
Почти такой же, но в полтора раза дешевле:
banggood.com/Skyzone-Upgrade-TS5823S-40CH-5_8G-200… а вот ещё дешевле. К слову, мне его прислали при заказе banggood.com/Eachine-TS5823-5_8G-200mW-32CH-AV-Tra… этого лота 😃
з.ы. с поинтами скайзон вообще 700 с копейками.
PS FrSky X4RSB c fpvmodel в руки через 10 дней. Очень быстро.
у вас видимо таможня шустрей работает. у нас же если через Оренбург (если не ошибаюсь) то только на таможне может месяц пролежать. единственно от редтускай с али приходят ну очень быстро.
у вас видимо таможня шустрей работает. у нас же если через Оренбург (если не ошибаюсь) то только на таможне может месяц пролежать. единственно от редтускай с али приходят ну очень быстро
Фпммодел посылает посылки тем же способом что и редитускай. Треки вида LM, емс по китаю и обычная почта по россии.
Конечно стоит. На ф1 сейчас только дронозавры летают😆
Да ладно. Стоит он в два раза дороже, а летает тоже в два раза лучше? В чем конкретно его преимущество?
Ребята подскажите.
Купил вот такой контроллер: banggood.com/SP-Racing-F3-Flight-Controller-With-I…
И страшно туплю с подключением.
Вот распиновка любезно расписанная какими то товарищами: 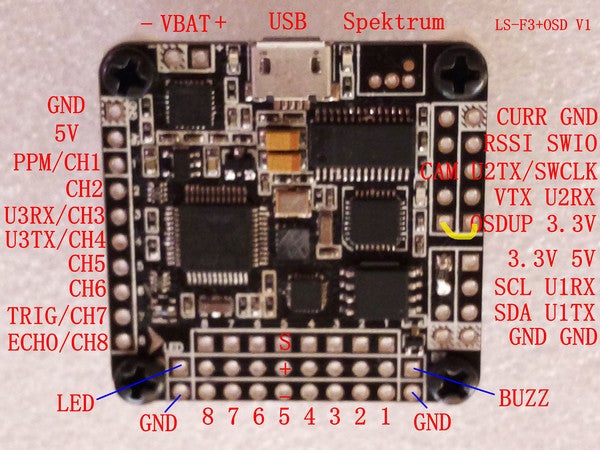
Куда подавать питание?
И что за контакты -VBAT+ ?
Это для мониторинга напряжения батареи?
Спасибо
Куда подавать питание?
питание ПК (5в) подается на 5V/GND или любой из +/-
И что за контакты -VBAT+ ?
Это для мониторинга напряжения батареи?
да
Куда подавать питание?
На оригинале я подавал питание на 5й канал. Чую, что в верхнем левом углу +5в теже самые, можно прозвонить.
И что за контакты -VBAT+ ?
Мониторинг напряжения акума.
ребята спасибо
Почти такой же, но в полтора раза дешевле: ru.aliexpress.com/item/Upgrad...HUGlK7gw%3D%3D
www.banggood.com/Skyzone-Upgr...p-1017491.html а вот ещё дешевле. К слову, мне его прислали при заказе www.banggood.com/Eachine-TS58...-p-981150.html этого лота
з.ы. с поинтами скайзон вообще 700 с копейками.
“Точно такая же, но другая”
я вам про фому, вы мне про ерему,
я вам про et200 еще и с рейсбандом, а вы мне про старый как мои валенки ts8523
я говорил именно про et200, именно за et200 могу говорить, что он у меня отслужил год на 3 сетапах, когда остальные умирали.
Просто рекомендую новичкам
У меня такие есть. Очень неплохие, но есть нюанс - у всех вместо 5в на выходе что-то в районе 4 вольт. ET600 или ET600R чуть побольше, но такой проблемы лишен
проверил, у меня кстати 5в, брал очень давно, видимо партии разные были
У меня все именно ET200R с рейсбандом, купленные в разное время, но в пределах пары месяцев - рейсбенд в этих передатчиках тоже появился сравнительно недавно. Думал, что косяк с напряжением у одного, оказалось, нет. Есть 3 шт, у всех такое. Питать от передатчика OSD и камеру, как я раньше делал, уже нельзя.
а вы мне про старый как мои валенки ts8523
Вы хоть ссылки то открывали? Вообще-то там не просто 5823, а TS5823S - с рэйсбэндом.
что он у меня отслужил год на 3 сетапах, когда остальные умирали.
Мой 5823 обычный, купленный в июне 2015, поставленный в июле на коптер, до сих пор живёт и летает, за это время у него была коза в разъеме, выгорел разъём, раскрошился корпус катушки, но это не сказалось на работе, он летал несколько аккумов без антенны, при этом, на первых каналах выдаёт около 390мвт после прогрева.
есть уже клоны кригера или митцуко или пододных рам? кто встречал?
Обзор вышел такой рамы
GE220 Frame Review from Banggood with Comparison to the GE-X240
Записал его настройки на листочек, по аналогии с классическими, но для IR-Sensitive камеры. В скобках значения по умолчанию:
Супер, сегодня как раз буду настраивать новую камеру и эти данные распечатаю и сохраню
PS А по скорости доставки посылок и работе таможни все очень просто, я поинтересовался, мне сказали что мало заказов, почтовые отделения пусты, отсюда и скорость таможни.
Да ладно. Стоит он в два раза дороже, а летает тоже в два раза лучше? В чем конкретно его преимущество?
Конечно летает лучше. И это уже много народу подтвердило. Я имею ввиду опытных пилотов. Во первых чип мощнее, а значит “думает” быстрее. Во вторых памяти больше, а это можно свежие прошивки в качать с новыми интересными фишками. И т.д. Это грубо говоря , как пересесть с карбюратора на инжектор😁