Прошивки CleanFlight/BetaFlight для полетников

но радость не была долгой.
А по мне это очень хорошо!
Значит работает!
PS Народ, а нужны такие новости или просто я молочу воздух ?
Конечно нужны, но только я не знаю английский как и большинство и поэтому наверное пропускаю.
А гугл переводчик всегда какую то херню переводит.
Так что если не трудно, то пишите изменения на русском.
Так что если не трудно, то пишите изменения на русском.
Проблема в том что Борис это размазывает и объясняет по всему форуму, это нужно делать выборку того что он собирается и почему. Поэтому я пишу их официальные строки, что обновилось и какие файлы.
Вот его ветка, если кто то шпрехает можно уточнять, достаточно читать постинги Бориса
www.rcgroups.com/forums/showthread.php?t=2464844&p…
Вот типичное его сообщение
Guys I tested level and horizon today and quite happy with the result of how it works. Only thing is that the Level P got lower in the last quaternion implementation.
I will release another version just to change level defaults.
I found that my copters needed P of 2 in PID1 and P of 7 in PID2 to have good level mode after rate mode was retuned.
What are peoples experience?
Что то испытал, что то обнаружил, что то подправил и новая прошивка.
Бетка обновилась до Betaflight 2.1.2b
github.com/borisbstyle/betaflight/releasesPS Народ, а нужны такие новости или просто я молочу воздух ?
Нужны. Я, скажем, постоянно читаю ветку Бориса на rcgroups, однако, там на день-два отойдёшь - и абзац - десятки страниц народ исписал. Аж руки опускаются читать… Однако, прочтёшь тут новость, что бетафлайт обновился - вот и стимул появляется собрать волю в кулак и всё-таки прочесть.
Нужны.
Глубина описания изменений может дойти до границы моего понимания 😃 Есть там раздел комиты, где сравнивают например прошивку Betaflight 2.1.2b с просто бетой В этом разделе пишется произошло изменение 1 файла и далее код программы в котором я дундук, поэтому что произошло в изменениях нужно действительно читать на форуме и как правило дается в коментах к новой прошивке. А я пишу вот о этой странице ( если кто то скажет что да там все элементарно, у меня будет повод задуматься… 😃 )
github.com/borisbstyle/…/v2.1.2b...betaflight
Обновилась бета до Betaflight 2.1.2c
Bugfixes:
- fixed pid_controller cli dump/get function, which was broken for different profiles than profile 0
- Fixed some minor issues with serial 1wire passthrough feature for F3 targets
- Fixed disconnect on save through configurator
- Spektrum bind enabled on MOTOLAB target
- Fixed Self level drift issues (more feedback needed, but it looks good)
Optimalisations/features:
- It is now possible to disable beeper on USB (beeper_off_flags = 256)
- Some default parameters optimised
- Yaw filter removed
- Added extra CC3D binaries for hexacopters without buzzer on pin6 (betaflight_CC3D_buzzer)
- Added extra safety on switch disarm
Изменения коснулись
betaflight_COLIBRI_RACE.hex
betaflight_MOTOLAB.bin
betaflight_SPRACINGF3.hex
Глубина описания изменений может дойти до границы моего понимания Есть там раздел комиты, где сравнивают например прошивку Betaflight 2.1.2b с просто бетой В этом разделе пишется произошло изменение 1 файла и далее код программы в котором я дундук, поэтому что произошло в изменениях нужно действительно читать на форуме и как правило дается в коментах к новой прошивке.
Сергей, а Вы не комплексуйте - просто продолжайте делать то, что считаете правильным. Что касается пожеланий от форумчан, чтобы Вы ещё и переводили список изменений на русский… Вот скажу как человек считающий русский язык высшей ценностью. И относительно неплохо одновременно с этим понимающий английский. Проблема перевода в том, что на русском нет заведомо устоявшихся терминов для ряда явлений. И какой перевод им не дай - он стопудово кому-нибудь не понравится. И ни Вам, ни мне не под силу повернуть язык столь огромной нации по своему желанию. Ну, не Пушкины мы с Вами, да…
А раз так - то и не надо заморачиваться. Давайте новости на языке оригинала. Кому надо - переведёт гуглом. Кому сильно надо - изучит английский. Что касается сути вещей и ссылки на diff в git - тем более не надо пытаться это перевести на человеческий язык. Кому сильно надо - тот и так поймёт. Кому не сильно - тому и без разницы на самом деле. Да, и кстати - спасибо за эту ссылку.
Ещё раз повторю - Вы, Сергей, делаете полезное и нужное дело. Не надо пытаться ещё одновременно творить чудеса и превращать воду в вино.
А если на компе нет интернета то как установить программу для настройки ?
github.com/cleanflight/cleanflight-configurator
Clone the repo to any local directory or download it as zip
Start Chromium or Google Chrome and go to tools -> extension
Check the “Developer mode” checkbox
Click on load unpacked extension and point it to the Cleanflight Configurator directory (for example D:/cleanflight-configurator)
Парни вопрос такой. Слышал что при установки бетафлайт на цц3д есть баг. Это при полете включается ФС. Сегодня прошил. Подлетнул и действительно он есть. Не исправили его еще? Версия 2.1.2 у меня.
Давайте новости на языке оригинала
Вы сейчас научите. Вон, еще один копипастер подтянулся - с github цитатку кинул как есть, на английском.
Читайте правила форума:
Официальный язык общения на сайте – русский. Исключение составляют только те, кто не владеет русским вообще и те, чей родной язык общения не является русским. В остальных случаях пользователи должны предоставлять перевод.
Всячески поддерживаю Сергея и его новости. Но если Вы “в теме” и знаете английский, не составит труда привести новость в оригинале, и рядом по-русски хотя бы парой фраз объяснить, что в ней нового и о чем она вообще.
Для новостей на английском мы все прекрасно можем сходить на rcgroups и пообщаться там.
Не исправили его еще?
Отвечу сам себе. Установил самую последнюю 2.1.2с . Так же срабатывает ФС без повода , и миник падает. Летал в 10 метрах перед собой. После установил ЛибреПилот , и всё стало нормально как и раньше.
Все таки нужно как это не нудно прошивать новые версии с затиранием старой ( Full chip erase ) Исправленные в коде изменения ( настройки сделанные им по умолчанию ) без этого не работают, на жалобы Борис пишет “Well when you flash it doesnt reset your settings. It means it still can use the old ones.” Прошивка не сбрасывает настройки и поэтому работают старые
www.rcgroups.com/forums/showpost.php?p=33138200&po…
Все его изменения в последних прошивках касаются настроек Level Многие это вообще не настраивают, Борис делает чтобы все работало по умолчанию.
PS Насколько я понял это началось с жалоб когда при вращении по Yow на висении квадрик заносило сильно в сторону, на видео отклонения были большие, причем если делать вращение медленно все было нормально, при быстром был сильный бросок в сторону. Народ считал настройки версии 2,11 хорошими, сейчас новая версия по поведению никак не должна отличатся от той 2.11 которая нравилась народу.
Полетал сегодня
понравилось прошивка BetaFlight больше чем стандартная cc3d
только по яву очень медленно вращается как увеличить скорость ?
и про пиды больше значения - лучше ?
скорости вращения - rate
например у меня по яву стоит 42, по остольным осям 50, и это довольно низкие скорости, у большинства больше
про ПИДы - лучше не больше, а правильно подобранные
и про пиды больше значения - лучше ?
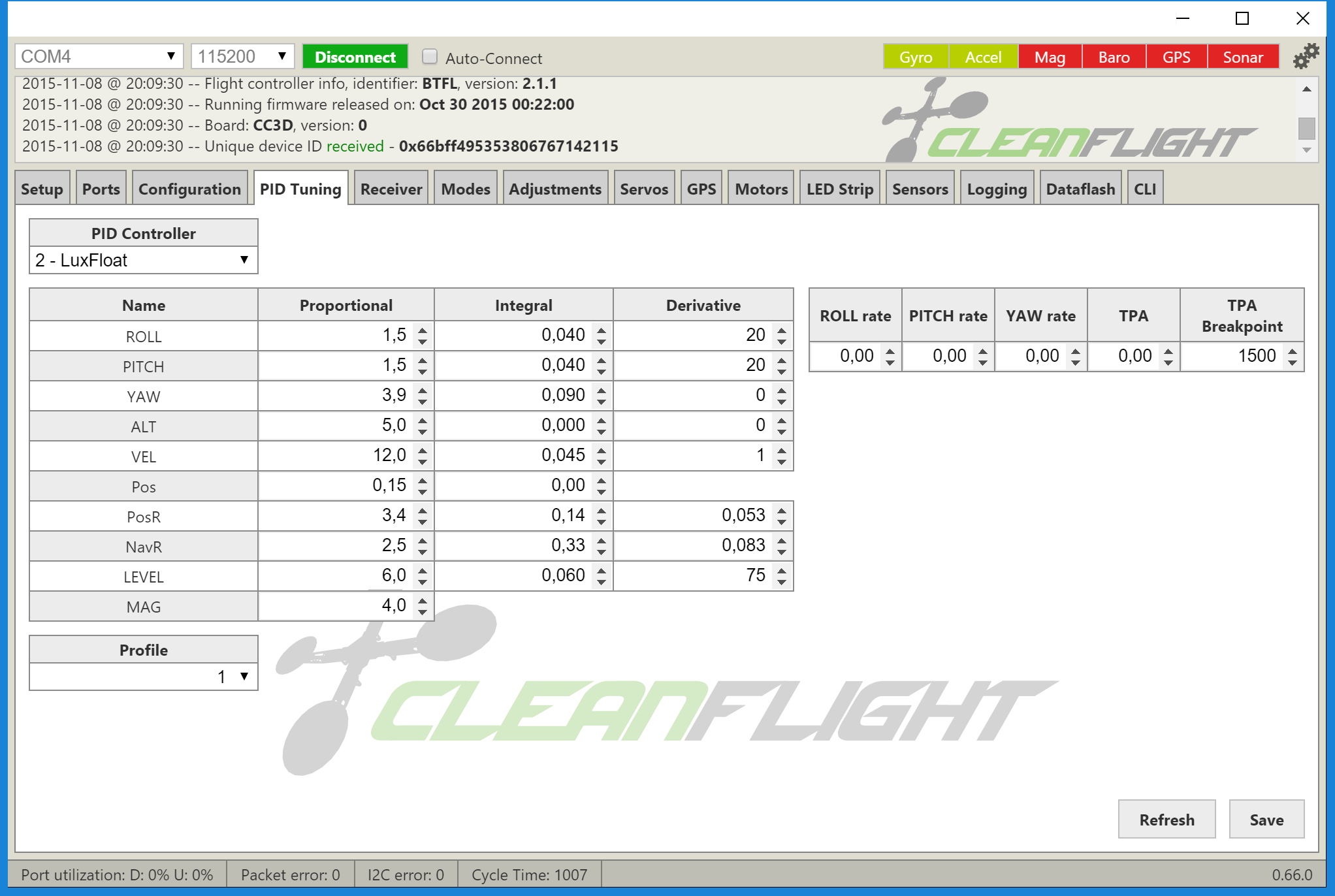
Да лучше. Цель прошивок Бориса это возможность задрать пиды как можно выше и уменьшить общее время реакции на внешнее воздействие ( te ) когда кривая загоняется в допустимые границы Steady state error и уже не выходит за эти границы. Суть прошивки на рисунке. Это в общем.
И правильно вам написали выше, увеличьте Yaw rate например поставьте 1.05 и плавно попробуйте
PS на видео по настройке в GTune пиды задрались аж мужики охнули, настроил свой квадрик будет погода выйду попробую, а до этого сделаю скрины что было и что стало. Еще усы антенн на приемнике выдернул пока верхнюю крышку снимал, усы были в затяжках…
Помню где то видел видео по настройке пидов через GTune, но теперь не найду. Не поделитесь ссылкой?
А раз так - то и не надо заморачиваться. Давайте новости на языке оригинала. Кому надо - переведёт гуглом. Кому сильно надо - изучит английский.
Кому сильно надо тот зайдет по ссылки официальных релизов Бориса и там на английском почитает, и гуглом там проще переводить, чем здесь через буфер в переводчик копировать. Здесь официальный язык русский, смысл суда репостить на английском.
Сам себе отвечу по поводу фейлсейва. Спрашивал тут
rcopen.com/forum/f136/topic430799/145
До этого всегда снимал галку фейлсейв в конфигураторе CleanFlight, чтобы при потере сигнала квадрик по инерции пролетел сколько то и потом снова возможно схватил сигнал и полетел дальше. Такой вариант отлично работал и на бетафлайте на всех версиях и на официальном клинфлайте с приемником d4r-II. Но на новом приемнике с sBus никак эта фича не работает. Моторы только сбрасывают обороты до холостых и продолжают вращаться при потере сигнала от аппы. (галка мотор стоп снята). В таранисе уже перепробовал все варианты, ничего не помогло. В итоге поставил галку фейлсейф в конфигураторе CleanFlight и стал работать штатный фейлсейф, когда при потере сигнала квадрик падает камнем и даже если сигнал уже снова появился, полет не восстановится. Нужно будет выдернуть и снова вставить питание чтобы приемник увидел таранис.
Читаю и удивляюсь отважным борцам с подключением приёмников по С-Бас. Столько заморочек с подключением через инвертор, с фаилсейфом.
Толи дело у меня с сателлитом Спектрум. Подключил и забыл. Никаких проблемм. 😃
Моторы только сбрасывают обороты до холостых и продолжают вращаться при потере сигнала от аппы. (галка мотор стоп снята).
Тут надо думать, анализирует контроллер пакет с признаком FS или просто выполняет команды, которые идут при FS. Если у вас FS запомнен как газ в 0, то что вы хотите от контроллера? Контроллер видит, что газ в нуле, обороты сбрасываются до холостых, ведь у вас галочки MOTOR_STOP нет. Вам помимо газа в 0 надо еще и коптер задизармить. И повесить арминг на тумблер и запомнить FS в приемнике, чтобы контроллер дизармился.
Если вы хотите, чтобы контроллер сохранял последнее значение газа, то надо приемник перевести в режим HOLD. Но это чревато, я бы не стал так делать.
Решение про флипы с минимальным газом относительно безболезненное: ставите галочку MOTOR_STOP и на отдельный тумблер делаете микс, который добавит немного газа, чтобы двигатели не останавливались. Можете совместить арминг и микс газа.
Если контроллер анализирует пакет с признаком FS, то тут уже мало что можно сделать, ибо все отдается на откуп программе контроллера. Борис что-то тестил и правил по этому поводу, но эта инфа мне осталась непонятной.
Установил самую последнюю 2.1.2с . Так же срабатывает ФС без повода , и миник падает.
Приемник тоже X4SB? Может спросить на рцгрупс?
Здесь официальный язык русский, смысл суда репостить на английском.
А я не против поста чейнджлога на английском. На эту тему я подписан и оперативно могу посмотреть важны изменения для меня или нет. Если не важны, то и прошиваться не буду.
Читаю и удивляюсь отважным борцам с подключением приёмников по С-Бас. Столько заморочек с подключением через инвертор, с фаилсейфом.
Выкинуть Таранис, купить Спектрум? А если бы траблы были со спектрумом, то поменяли бы на таранис/футабу или воевали дальше? Отсутствие/наличие инвертора это фиг знает почему. Не ясно, зачем Frsky не сделали такой же сигнал, как на оригинальной Futaba. Возможно чтобы не засудили.
Приемник тоже X4SB? Может спросить на рцгрупс?
нее. Приемник D4R с РРМ который.