SmartBird Festo и другие

Да конечно. У меня есть EagleTree 2D/3D трехосевой стабилизатор, но тогда бы понадобилось добавлять аэродинамические тормоза на крыле. Это не намного красявее, и только усложнит модель.
У меня есть EagleTree 2D/3D трехосевой стабилизатор
Мне кажется он глючить будет от колебаний фюзеляжа , особенно по каналу РВ .
Думаю не будет потому, что каналу РН это будет перпендикулярно.
Поработаем серым веществом нашего мозга (“не такое уж оно, у нас, и “серое” как Вы думаете” (С)Карнавальная ночь).
Наглядной моделью крыла как движителя могут быть крылья не летающих пингвинов (и лапы больших морских черепах). Они предназначены не для создания подъемной силы, а только горизонтальной тяги поэтому по форме и действию они очень близки к лопастям воздушных винтов.
“Форма тела пингвинов обтекаемая, что идеально для передвижения в воде.Плечевая кость и кость предплечья соединены в локте прямо и неподвижно, что увеличивает стабильность крыла. Грудная мускулатура развита и составляет иногда до 30 % массы тела, что несколько превышает мускулатуру самых мощных летающих птиц. Мускулатура и устройство костей позволяют им под водой работать крыльями почти как винтами. Это позволяет им двигаться под водой со скоростью до 45км/ч”.
Как работает машущее крыло птиц в режиме горизонтального полета. Еще раз подробнее.
“Кисть” крыла птицы, на фазе рабочего хода, работает подобно воздушному винту.
Скорость полета (набегающего потока воздуха) и скорость крыла суммируется и получается скорость воздуха обтекающего профиль крыла и создающего тягу и подъемную силу. На участке обратного хода вектор подъемной силы повернут назад, поэтому, что бы не создавать сопротивления нужен минимальный угол атаки.
Почему крыло птицы не может работать за счет “фан-эффекта” (на формулах для гидравлического удара в водопроводных трубах)? То что получается у дельфина и рыб не может работать у птиц, по причине в 1000 раз менее плотной среды и значит в 1000 раз более слабого эффекта от “фан-эффекта”.
Не читайте статью.😃
Я уже давал ссылку на этот "сложный вопрос".
Потому, что несмотря на название статьи “Элементарная теория машущего полета”, делается сравнение эффективности воздушного винта и машущего крыла только на режиме висения. Т.е. ставится в один ряд работа крыльев с одной стороны шмеля, колибри и с другой стороны трехметрового кондора и альбатроса в режиме висения.
Представьте себе работу крыльев альбатроса, который взлетает штатно только против ветра, разбегась по самолетному почти не махая крыльями, в режиме висения 😃
Или крыльев кондора, который стартует с возвышенности и которому практически не реально взлететь с равнины, в режиме висения 😃 И потом делается вывод о неэфективности применения машущего крыла крупнее колибри для режима висения, а не для машущего полета.
Не говоря уже о полном винегрете в описании исходной модели машущего крыла.
Неплохая научная работа [23] (в списке литературы) с применением теории воздушного винта к полету голубя, называется полностью неадекватной.
А теория горизонтального машущего полета проста как 5 копеек. Машущее крыло на не рабочих фазах, не создает дополнительного сопротивления или вихреобразования. Поэтому сравнение эффективности с воздушным винтом может быть сделано по ометаемой площади деленной на соотношение рабочей и не рабочей фаз. И если эффективная ометаемая площадь машущего крыла больше (с учетом фаз) то и эффективность его больше, за вычетом потерь в трансмиссии. И если кто то написав статью хотел прекратить попил бюджета, то не очень удачно. Потому,что если не американцы то китайцы или немцы обязательно сделают беспилотник на таком принципе.
Интересная симуляция, но не моя.
Эта вихревая дорожка оказывается не имени Кармана, а имени ученика Жуковского - ВВ.Голубева. Ну в общем и без интегралов примерно понятно как это функционирует и чем отличается от работы крыла насекомых.
Вот интересный подход по Американски:
Им придется управлять каждым суставом иногда в двух степенях свободы. Ннет это не наш метод. 😃
Пока изучал, что было сделано раньше, решил, для получения быстрого результата, сделать промежуточноый вариант по отработанной схеме Яковлева В.Г. (улучшенная схема ДаВинчи?). Только с электрическим приводом.
На результат тут работает, малая нагрузка и отработанная схема.
Самое сложное это аэродинамически эффективный движитель - “кисть” крыла. Есть несколько вариантов придания формы. Угол атаки за счет упругости торсионной пружины в креплении и упоров. С этим придется повозиться, работа почти ювелирная.😃
Есть несколько вариантов придания формы.
Это важно потому, что вогнутый профиль примерно в два раза лучше чем плоская пластина. Есть вариант использовать тянущуюся пленку и нервюры (как у летучих мышей, хороший вариант, но нет в наличии) или покрой пленки как парус с “пузом” (который так же нужно поддерживать нервюрами, что в минус). И есть вариант сразу использовать материал который сам держит форму и не будет хлопать при обратном ходе - правильно “потолочка” 😃.
В любом случае в основе жесткая основа из хлыстика китайской удочки с поворотным креплением и торсионной пружиной для изменениея угла атаки.
Разберемся во всех подробностях как оно устроено, летает и как его усовершенствовать и построить в домашних условиях.
А что тут разбираться. На сайте Фесто куча фотографий и видео для копирования. Механика полета птицы в инете лежат научные статьи и книги. За рубежом по моим подсчетам уже трое сделали аналоги Фесто видео то же в инете.
Усовершенствовать - зачем изобретать колесо ,лучше и проще чем Фесто вряд ли можно что то придумать для того что бы построить и летать и получать удовольствие.
Проблема в другом в копирование и заставить крыло делать полный взмах и хлопок (ход крыла в низ).
Электроника схемы да то же в инете можно найти .Другое дело подогнать под себя и изменить программное обеспечение их.
Вот точная копия
У меня уже на половину готовые чертежи и схемы ,да же макет крыла.Но заставить крыло махать как положе вот тут то и загвоздка.
А что тут разбираться.
Я как бы раньше этой темой не интересовался, по этому приходится разбираться.
заставить крыло делать полный взмах
Вот то то и оно, что кинематика здесь не идеальная, крыло в плече начинает опускаться когда еще “кисть” не дошла до конца вверх. Ход в “плече” только 45градусов. Привод не обязательно копировать, по моему чем исправлять ошибки лучше сделать всё заново.
заставить крыло махать как положе вот тут то и загвоздка.
Выбросить привод “кисти” от кривошипа крыла и сделать для этого отдельный привод.
инете лежат научные статьи и книги.
Поделитесь списком если не сложно.
Ход в “плече” только 45градусов.
Вообще то 35*-40* в верх и 10* вниз.Книги Виноградов ИН аэродинамика птиц парителей .Васильев ГС Основы полета моделий с машущим крылом.Статья была Почему птицы летают и Теория полета птиц. Где они были в инете не помню ссылок нет.Да просто в поисковике забить Теория полета птиц и смотреть что вылезет.Достаточно понять движение крыла и центровки птицы.
Редуктор там нормальный. Вся проблема или в кисте или в шатуне.
крыло в плече начинает опускаться когда еще “кисть” не дошла до конца вверх.
Да именно так. Что они там замутили я так и не понял ,хотя у них плечо выгибается чуть ли не дугой. На макете пробовал по разному ,не выходит.Хотя у парня на видео это получилось.
Выбросить привод “кисти” от кривошипа крыла и сделать для этого отдельный привод.
Это усложнит редуктор а так же это может отразиться на весе птички. К стате если не ошибаюсь у них она весит порядка 470грамм(полетный вес).
Меня интересует какой моторчик ставить (обороты-мощность).Акк где то 1000Ач минут на 5 хватит.
Меня интересует какой моторчик ставить (обороты-мощность).
Сколько зубъев на главных шестеренках? Моторчик скорее всего нужно 350kv на двух банках.
Я вот смотрю в сторону червячного редуктора из стеклоподъемников или “дворников”, очень высокая прочность при небольшом весе если корпус выбросить.
смотрю в сторону червячного редуктора
Нееее.Я делаю как у Фесто,все уже подобрано.Мотор я прикинул ставить из серии 2822-2826 /где то 900-950KV и мощностью 200-240W(если китайцы не врут.А пока подбираю что лучше),акк на три банки.Стенки редуктора буду даль из сандвич панелей( 2слоя 1мм фанера и три слоя рогожа угля)думаю миллиметра 3-4 стенку получу.ну все остальное то же уголь.Думаю в полетный вес в грамм 500 уложиться,при размахе крыла 2м. Сейчас пока танцы с бубнов вокруг крыла . К с тате знакомых нет кто мог отредактировать программу для пик контролера ,и вообще в электронике разбирается.
К с тате знакомых нет кто мог отредактировать программу для пик контролера
К сожалению нет.
Так какой там редуктор и основные шестерни на SmartBird? А то скорость маха(скорость моторчика/редуктор) с углом установки профиля непосредственно связана. Если “неправильно” махать, то никакого эффекта не будет. Это и есть основная проблема махолетов, насколько я понимаю, нет тяги если режим работы крыла в точности не соответствует скорости полета. Это как неправильный шаг на воздушном винте, или большой шаг - перегрузка мотора - нет тяги, или малый шаг - недогрузка мотора - нет скорости потока, на рабочей скорости опять нет тяги.
Совместить контроллер с датчиком воздушной скорости конечно было бы идеально, иначе махолет это однорежимный аппарат.
Заморочился посчитать угол установки крыла при взмахе для небольшой модели. Если взять скорость полета 10м/сек и взмах за 0,2сек примерно на 0,2м = 1м/сек в середине (маленькая метровая модель), 2м/сек на конце. То нулевой угол атаки в середине -6 градусов, рабочий -2 градуса (угол атаки 4). на конце -12 градусов, рабочий -2 градуса (угол атаки 10). При отсутствии крутки. Короче чёрт ногу сломит 😃.
Эко тебя торкнуло…Рассматривай полет птицы как полет планера,только для взлета используется взмах крыла. Винт выталкивает поток воздуха назад вдоль самоля создавая тягу , а взмах крыла под себя направляет поток воздуха,создавая вертикальную тягу. Грубо говоря так. А угол атаки установки крыла думаю делать в +2*,больше не имеет смысла. Главную роль играет правильная амплитуда взмаха крыла. Правда полную амплитуду как у птиц повторить сложно ,очень сложные узлы сочленения в крыле будут,пока не хочется этим заморачиваться.Тем более летит с половиной амплитуды.
Во, хочешь мозги заморочить посмотри в личку кинул ссылку на книгу пароль в личке.правда там одни скупые расчеты.
vitanar.narod.ru/autors/…/toropovvlad.htm вот статейка посмотри
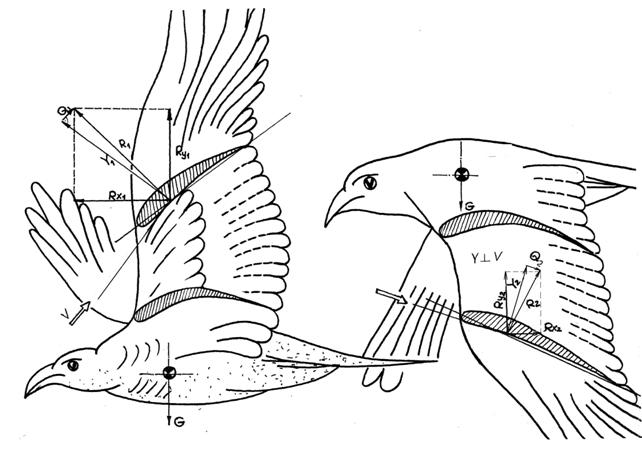
при опускании крыла при подъёме крыла
Схема сил махолёта
Спасибо, хоть я в сверхестественное не верю (про эфироиды:)), но почитаю (сказка ложь да в ней намек).
Интересная история от Владимира Торопова.
Углом атаки крыла управлял специальный пружинный механизм. Затем я стал управлять рукой – стало лучше. Создавалось впечатление, что крылья нуждаются не столько в силе, сколько в правильном управлении.
А что Владимир Торопов не запатентовал еще способ извлекать бесплатную энергию из воздуха? Раскачать упругое крыло крутильно-элеронным флаттером и забирать часть энергии на тягу.
Но дело в том что флаттер это не бесплатное мероприятие, он берет энергию из воздуха тормозя крыло.
Хотя есть заявка “крылья мускульного махолета с резонансным приводом (заявка ******* Булычева М.Г.от 21.01.1988 г.”
В этом здравая мысль в том, что без пружинного аккумулятора энергии махов, требуется в два раза больше затрат этой энергии на машущий полёт.
Птицы и насекомые об этом знают и накапливают энегрию в растягивающихся машцах. Но в Festo SmartBird такого нет, не такая уж и умная эта птичка 😃.
Но в Festo SmartBird такого нет, не такая уж и умная эта птичка .
Они пошли по простому принципу ,и они использовали геометрию движения крыла ,и в этом плюс. Если бы они хотели сделать мускульную систему они бы сделали но это было бы очень тяжелый аппарат. А механические руки -ноги с использованием мускул они уже повторили сделав роботов человека и животных.
По этому нам не следует то же заворачиваться какими то не понятными разработками других,хотя они выглядят интересно.
Что у тебя с амплитудой маха или делаешь другой редуктор. Я уже пробовал менять геометрию шатуна ,добавлять дополнительные элементы ,но пока без результата.Математически рассчитать с помощью тригеометрии или механики не знаю не селен.,можно ли.