разные углы отклонения от нейтрали серв KST X08

разные углы отклонения от нейтрали сервы KST X08
пульт показывает длительности PWM импульсов :
998-1500-2012 мкс
Разницы ширин импульсов от импулься нейтрали нейтрали 1500мкс - 512мкс в оба направления.
Т.е. серва отрабатывая сигнал должна отклоняться на один угол от нейтрали. Собственно так поступают и другие мои сервы.
Но физически качалка сервы в одну сторону отклоняется примерно на 5-7градусов меньше.
Общий угол отклонения качалки от крайних положений 120грд (на глаз)
Две сервы, обе одинаково ведут себя.
Для серв Hyperion Atlas DS09 есть адаптер и программа, которыми могу задать как угол отклонения так и сделать коррекцию нейтрали.
Я знаю, что пультом можно определить расходы, нейтраль и пр…
Но у меня привычка настраивать по “железным” параметрам, которые стоят по умолчанию.
То что у меня происходит с сервами (разные углы) это уникально, только у меня?
Есть ли софт, для настройки серв KST X08?
1500-998=502 (мкс)
2012-1500=512 (мкс)
512-502=10 (мкс)
если 502 (мкс) -принять за 100%
а 10(мкс) принять за - х %
то х = (100% *10мкс) / 502мкс =1,99 % то есть практически 2 %
Если верить что полное отклонение 120 градусов, то есть в одну сторону 60 градусов, что в общем-то излишне, так как после 45 градусов начинается очень большое дифференцирования хода тяги. Ну ладно пусть 60 градусов, тогда 2 % от 60 градусов должно быть 1,2 градуса Действительго не совпадает. Но дело в том, что для отклонения на 60 градусов в одну сторону в сервах обычно длительность управляющих импульсов должна меняться не на 500 мкс а на 700. То есть общий ход на 120 градусов это от 800 мкс, до 2200 мкс (1500 мкс- нейтраль.)
ошибочка вышла, там 988мкс в одном крайнем положении, в остальном цифры правильные.
а потом посылка о том, что для отклонения на 60грд нужно 700мкс - не совсем корректна.
Это установлено в настройках сервы. Как я уже писал, другая серва, подключенная в параллель, имеет угол отклонения ±45 грд (полный 90 грд)
Причем отклоняется в обе стороны одинаково.
Более того, сам настраивал программно свои Гиперионы - у них можно задать этот угол (Operating travel), при тех же значениях управляющего импульса. И положение нейтрали тоже.
Вот хотелось бы и для этих серв сделать все симметрично.
Если это чудо от наших друзей с АЛИ, и заявлено как цифровое- то возможно при наличии программатора к ними можно настроить, а так- что они там впихнули- то оно и будет, У них при заявленной мертвой зоне 3-5 микросекунд бывает мертвая зона до 120 микросекунд, то есть только когда ручку на передатчике отклонишь примерно на 1/5 хода- серва начинает реагировать, а до этого вроде как передатчик выключен…
Я не хочу сейчас перемывать кости “друзьям с Али” (у меня многие(почти все вещи работают), повторюсь, смысл темы:
То что у меня происходит с сервами (разные углы) это уникально, только у меня?
Есть ли софт, для настройки серв KST X08?
Если да - пожалуйста ссылку?
Если да - пожалуйста ссылку?
Юра , каким образам это отразится на практике в твоих полётах?
😁 на F5K
Полетать мне найдется и на чем-то другомB-)
Тут частно.практический случай когда конец качалки а за ней и тяга в крайнем положении пересекают некоторую плоскость, которую не должны пересекать 😃 Ибо тяга будет ломать палубу и редуктор сервы.
Дело слегка изменилось.Это одна серва такаАая. Эти сервы на элеронах металки.
Стало быть хорошо бы понять как другую привести к нормали -одинаковому углуотклонения. Разобрать и потенциометр повернуть? Эх разбирать придется, стОит серва не дешево, лишней нет.
ошибочка вышла, там 988мкс в одном крайнем положении, в остальном цифры правильные.
а потом посылка о том, что для отклонения на 60грд нужно 700мкс - не совсем корректна.
Это установлено в настройках сервы. Как я уже писал, другая серва, подключенная в параллель, имеет угол отклонения ±45 грд (полный 90 грд)
Причем отклоняется в обе стороны одинаково.
Юрий , всё таки практические выводы после таких изысков ?
Вы крутите строгий пилотаж за рамками дозволенных отклонений сервушек и Вас смущает не симметричное исполнение фигур(бочки ) в одну и другую сторону ?
Разобрать и потенциометр повернуть?
Эх разбирать придется, стОит серва не дешево, лишней нет.
ждём результата , если он того стоит , или серва в ведро ?
А лишней нет!
Полетать мне найдется и на чем-то другомB-)
Тут частно.практический случай когда конец качалки а за ней и тяга в крайнем положении пересекают некоторую плоскость, которую не должны пересекать 😃 Ибо тяга будет ломать палубу и редуктор сервы.Дело слегка изменилось.Это одна серва такаАая. Эти сервы на элеронах металки.
Стало быть хорошо бы понять как другую привести к нормали -одинаковому углуотклонения. Разобрать и потенциометр повернуть? Эх разбирать придется, стОит серва не дешево, лишней нет.
А мне не понятно про какую палубу идет речь, Ведь даже на гидросамолетах нет палуб. Ну да ладно меня больше интересует зачем надо на серве иметь отклонение 60 градусов в одну сильно увеличивается сопротивление и руль вроде как больше похож не воздушный тормоз. Не , конечно если на руле установить кабанчик в два раза длиннее чем качалка на серве, то благодаря Архимеду можно получить усилие в два раза больше. Но при этом сильно не линейно будет передаваться на руль изменение положения качалки. то есть мы получим своего рода отрицательную экспоненту, которую можно получить и через передатчик. Ниже я привел картинку как увеличивается разница между отклонением качалки и кабанчика после отклонения качалки больше чем на 45 градусов. При этом еще и отношение люфтов в кабанчике и качалке к ходу тяги значительно сильнее сказывается на люфте самого руля. Тяга постепенно приближается с постановке не мертвую точку.
Там над тягами указана разница между углами отклонения качалки сервы и руля , а в скобках приращение изменения по отношению к предыдущей картинке.


Вид снизу. Площадка на которой установлены сервы называю палубой.
Надеюсь Вам видно, что качалки пропущены через прорези в палубе, как крепятся тяги и можете представить, что будет, если конец качалки поднимется над палубой?
Я извиняюсь за оф. , Но подсказать про причину я не могу ничего, А вот на счет разборки сервы- я бы лично сделал бы это первым делом. Просто хотя бы для того, что бы убедится в наличии смазки и подшипников. Часто вместо подшипников бывают простые втулки. А там уже и заодно - возможно ли покрутить резистор. Скорее всего вряд ли. обычно там или лыска или выступ , для однозначного фиксирования. Заодно и полюбовался платой, что бы увидеть единственную каплю смолы закрывающую всю супер-мупер электронику и усугубить сомнения о наличии цифровой электроники.
Честно говоря не рассмотрел- уж слишком мелко все. Это ты сам их так втулил туда или это покупное все. Но в любом случае. надо всегда прорисовать кинематику и чисто на физическом уровне исключать такие явлентия В кинематике не должно быть возможности залезть туда куда тебе этого не надо.
Увеличил % всего экрана в целом, рассмотрел картинки. Да, там 60 градусов отклонения на фиг не нужны. Если твоя аппаратура позволяет, то настрой для этих каналов отклонение качалки. Причем это обычно можно делать от НУЛЯ градусов до максимума и в каждую сторону свое- и забудь , не парься с разными отклонениями.
Разницы ширин импульсов от импулься нейтрали нейтрали 1500мкс
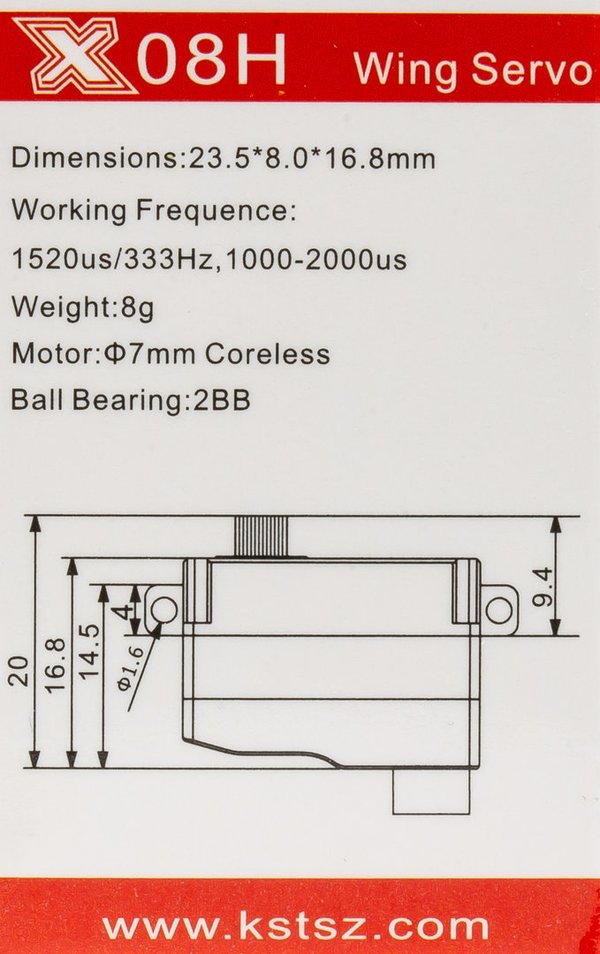
Вообще, коробка от сервы должна говорить, что центр - 15 20 us:
То что у меня происходит с сервами (разные углы) это уникально, только у меня?
На вале сервы 15 зубцов, перестановка качалки на 180 градусов сразу даёт разницу в нейтральном положении в 12 градусов!
Можно измерять от любого положения качалки, но от качалки в при сигнале нейтрального положения. Измеряем угол в одну сторону. Потом измеряем угол от нейтрального положения в другую сторону.
Так вот.
Эти
Углы.
Разные.
Эти Углы. Разные.
Значит, китайцы поставили потенциометр с нелинейной характеристикой. Ну не завезли вовремя нужных!!! А план гнать надо.
Победить можно настройкой конечных точек с передатчика. Проблема - как два пальца…
А что это за сервы кст кто производитель и какое качество?
За ссылку спасибо, но я выхожу в инет с мобильника и не все могу открыть. Так что вопрос остается открытым. С уважением.