Автопилот Arduplane - открытое ПО

ArduPlane 3.0.0 стал доступен среди прошивок
Насколько я понял из пресс-релиза, основные вкусняшки там для пиксхавка:(
основные вкусняшки там для пиксхавка
Но и для АПМ тоже есть кое-что:
- geofence changes
- the flaps code
- new autolanding code
Кажется порешал проблему с компасом. Хочу поделится.
Исходные данные:
Использую:
- телеметрия на 1 ватт
- 433 РУ
- MinimOSD. Запитана строго от 5 вольт (запаяны перемычки).
- APM c RCTimer
- BEC не знаю какой, но по размеру довольно здоровый.
Подключено. Через BEC подключен APM, к нему все остальное.
Телеметрия воткнута в родной 5-ти контактный порт
Приемник питается от A0 (и заодно туда RSSI выплевывает)
MinimOSD подключена 3 контактами к выходу UART вдоль длинной стороны.
Когда все включено, калибровка компаса выдает офсеты 0 0 0 или бывает 1 -1 0 (и т.д. больше 1 значений не видел). Мишин планер показывает вращение тушки (гироскопы), но компас потом встает все время в одном и том же направлении, не зависимо от положения тушки.
При отключении MinimOSD все приходит в норму, офсеты порядка 70…100 (не записал).
Запитываение MinimOSD от BEC (а НЕ через плату APM), проблему тоже решает. Компас нормально калибруется и нормально показывает.
Видимо на плате как то дорожки хитро проходят, что при большой нагрузке на боковой порт UART начинают сильно влиять на компас.
Может кому поможет.
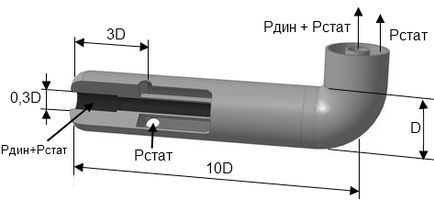
а есть ли ограничения на диаметры(сечения) для трубочек воздушного давления?
На диаметры сечения не знаю, но расстояние от носика трубки до первых дырочек статики должно быть не менее трех диаметров наружной трубки
вот такую картинку нашел отсюда
Кажется порешал проблему с компасом. Хочу поделится.
Исходные данные:
Использую:
- телеметрия на 1 ватт
- 433 РУ
- MinimOSD. Запитана строго от 5 вольт (запаяны перемычки).
- APM c RCTimer
- BEC не знаю какой, но по размеру довольно здоровый.
Подключено. Через BEC подключен APM, к нему все остальное.
Телеметрия воткнута в родной 5-ти контактный порт
Приемник питается от A0 (и заодно туда RSSI выплевывает)
MinimOSD подключена 3 контактами к выходу UART вдоль длинной стороны.Когда все включено, калибровка компаса выдает офсеты 0 0 0 или бывает 1 -1 0 (и т.д. больше 1 значений не видел). Мишин планер показывает вращение тушки (гироскопы), но компас потом встает все время в одном и том же направлении, не зависимо от положения тушки.
При отключении MinimOSD все приходит в норму, офсеты порядка 70…100 (не записал).
Запитываение MinimOSD от BEC (а НЕ через плату APM), проблему тоже решает. Компас нормально калибруется и нормально показывает.Видимо на плате как то дорожки хитро проходят, что при большой нагрузке на боковой порт UART начинают сильно влиять на компас.
Может кому поможет.
за это надо давать медаль.
от этого не только uart питается но и берет питалово (хоть и немного вся трехвольтовая цепь)

в результате потребление по 3,3 создает магнитное поле компасу,
переменное потребление - шум и отклонения
в результате потребление по 3,3 создает магнитное поле компасу,
переменное потребление - шум и отклонения
Ну по 3.3 совсем мало кушается наверное. И калибровка компаса может это учесть. А вот MinimOSD с запаяными перемычками жрет прилично судя по нагреву.
Ну по 3.3 совсем мало кушается наверное. И калибровка компаса может это учесть. А вот MinimOSD с запаяными перемычками жрет прилично судя по нагреву.
а вот это я как нить на днях и проверю
отрежу питание стаба от пина питания UART и прицеплю где нить в другом месте и посмотрю как поменяются офсеты после калибровки
вот такую картинку нашел отсюда
Как жаль, что я не нашел эту картинку до того, как сделал трубку, было бы все по науке. Однако, первый блин может быть и комом. ЧТобы убедиться, так это или нет, в ближайшем будущем будет создан стенд с APM 2.5.2, GPS и ПВД с датчиком, закрепленный на автомобиле на специальном выносном кронштейне. Там и проверим, как все это работает-калибруется и что в итоге показывает. Дайте только времени чуток. Результатами обещаю поделиться.
ЧТобы убедиться, так это или нет, в ближайшем будущем будет создан стенд с APM 2.5.2, GPS и ПВД с датчиком, закрепленный на автомобиле на специальном выносном кронштейне.
Не тратьте время на сомнительный эксперимент.
Если хотите проверить калибровку датчика приборной скорости, делайте с помощью простейшего водяного манометра. См.rcopen.com/forum/f90/topic316066/1436 Табличку соответствия скорость/динамический напор человек уже сделал. Для наших скоростей/задач вполне достаточно.
Здравствуйте.Задам наверное глупый вопрос.Хотел найти на него ответ сам,но признаться замучился читать тему.
Интересует какие сервоприводы лучше использовать с АП,аналоговые или цифровые? Вроде как раньше было можно менять в настройках и было пофиг какие,но может все уже изменилось?
Цифровые дороже и точнее. А АПМ решительно все равно, на какую серву передавать широтно-импульсные последовательности, цифровую, или аналоговую, я так думаю. Но могу и ошибаться 😃
Приветствую.
Подскажите кто подключал приемыш rockwell hobby+ к АПМ, интересует вывод с приемника rssi в АПМ, как правильно настроить?
Что только не делал и как только не подключал, при выключенном передатчике RSSI в мишн планере скачет от 20 до 45, при включенном передатчике в пределах 10 метров RSSI показывает от 80 до 98.
rockwell hobby+
А у него RSSI в каком виде ? PWM наверное ? APM хочет напряжение от 0 до 5 (или можно до 3.3 настроить). Если так, то кондер вешать на выход RSSI.
Коллеги, столкнулся со странной особенностью АРМ 2.6 - в полете в Mission Planner пишет ‘Bad Compass Health’ , но при этом GPS lock есть, все спутники видит, курс держит в режиме CRUISE… Кто знает что это может быть? …я вообще не заметил чтобы это на полет как-то влияло
АРМ 2.6 - в полете в Mission Planner пишет ‘Bad Compass Health’ , но при этом GPS lock есть, все спутники видит, курс держит в режиме CRUISE… Кто знает что это может быть? …я вообще не заметил чтобы это на полет как-то влияло
А компас калибровали в ручную ? Показывает потом правильно ?
честно говоря, по-моему нет, но он всегда показывал верно и никаких проблем не замечал раньше… да и калибровка я думал для коптеров важна, я даже на plane.ardupilot.com вики не нашел ничего по калибровке… компас встроенный у меня.
честно говоря, по-моему нет, но он всегда показывал верно и никаких проблем не замечал раньше… да и калибровка я думал для коптеров важна, я даже на plane.ardupilot.com вики не нашел ничего по калибровке… компас встроенный у меня.
Проверьте как показывает. Поверните самолет на север носом, подождите секунд 20, посмотрите куда покажет, потом на юг (ну для примера). Главное не забывать ждать 20-30 секунд.
Если встроенный, то надо еще смотреть как на него влияют потребители сильноточные (те же провода к регулю к примеру).
У меня такое (bad compass helath) было, когда компас ловил магнитную наводку сильную и вообще показывал всегда в одну сторону.
Если компас не нужен, то проще его вообще отключить, и он надоедать не будет. На сколько я понял, особо сильно он нужен тока для взлета (когда скорость маленькая и GPS не показывает направление еще).
Калбровка описана в мишин планере, там где компас настраивается.
честно говоря, по-моему нет, но он всегда показывал верно и никаких проблем не замечал раньше… да и калибровка я думал для коптеров важна, я даже на plane.ardupilot.com вики не нашел ничего по калибровке… компас встроенный у меня.
если у вас АРМ 2.6 это означает что встроенного компаса у вас нет
я даже на plane.ardupilot.com вики не нашел ничего по калибровке…
Там подробно описаны целых три варианта калибровки. Первый автоматический. Поэтому, как бы, можно не калибровать.
plane.ardupilot.com/wiki/…/first-time-apm-setup/#S…