Обзор Eagletree OSD Pro

Stabilizer Responsiveness
Ясно! Т.е. этот пункт относиться непосредственно к пункту, когда стабилизация включается “по бросанию ручек”. Эх, жаль, а то я уже обрадовался 😃
Итак, полетал… Сложилось такое впечатление, что иглу стало очень холодно и он постоянно (в режиме АП) наровил улететь к себе на родину - в китай 😃 База находится на севере, а он, после включения АП 2-3 сек продолжал лететь прежним курсом, а потом делал резкий разворот, на 180 градусов к базе (на Юг). И дальше по-всякому: То проболжал виражи делать, то останавливался и дальше улетал от базы на Юг, потом опять виражи наворачивал.
Очень странно 😦
Я, перед полетом, уменьшил ПИД, отвечающий за крен (а то он очень резко разворачивал, и у базы крен большой делал). Еще один ПИД, отвечающий за поворот. ПИД, отвечающий за курс не трогал (было 255).
Уменьшил общую чувствительность гардиана до 5 (было 8, из-за этого, в режиме АП он по высоте срывал самоль).
Как только с бубном не плясал - все тоже самое! О.о Даже ПИД, отвечающий за курс (терн пропоршионал лимит поставил, пчоти, в штатное значение - изминений нет) Логики между значениями ПИДов и работой АП не вижу вообще 😦 Такое ощущение, что он сошел с ума 😦
Придется бэкапить. Мб и поможет. Жаль, что тогда сотруться настройки АПУ 😦
Прошивка 10.39. До этого дня все работало нормально.
Сегодня было -15. Претензий к работе самого гардиана нет. Работал четко.
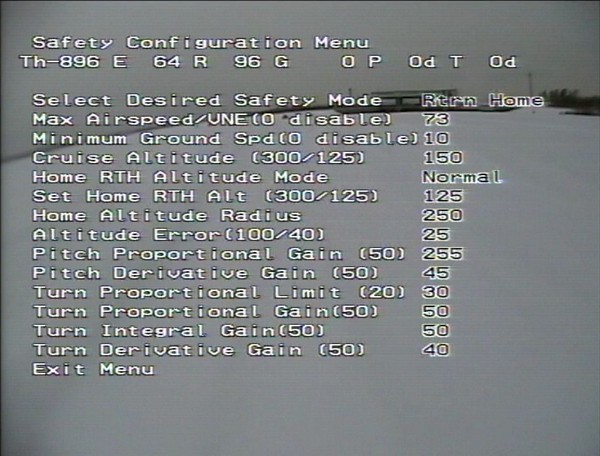
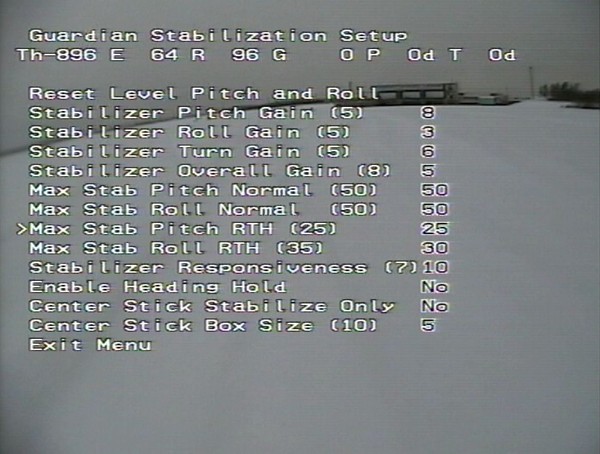
Вот такие настройки сейчас у меня стоят:
Ребят, выручайте, где тут криминал?
ПИД, отвечающий за курс не трогал (было 255
У вас же тангаж(PPG) на 255 стоит.
А крен (параметр TPL )стоит всего 30. Увеличивайте его гденить до 200 и все будет нормально. А PPG не надо такой большой делать. Он будет слишком сильно задирать нос самолета для набора высоты.
У вас же тангаж(PPG) на 255 стоит.
А крен (параметр TPL )стоит всего 30. Увеличивайте его гденить до 200 и все будет нормально.
Так, я же написал, что УМЕНЬШИЛ терн-пропорционал-лимит с 255 до 30. И разницы ни какой не увидел 😦 До этого он так и стоял 255.
А тангаж, все верно, пришлось выкрутить на максимум, т.к. игл, инача, почти не рулил РВ. Ооооооочень вяло им рулил. Когда выкрутил - стало лучше, но все равно, маловато. Элеронами раз в 10 круче рулит.
Так, я же написал, что УМЕНЬШИЛ терн-пропорционал-лимит с 255 до 30. И разницы ни какой не увидел До этого он так и стоял 255.
Limit задаёт ограничение максимальной реации. А саму реакцию надо увеличивать следующим параметром Gain.
Так, я же написал,
Очень много написано, я не понял что к чему))
Попробуйте убавить Stabilizer Turn Gain до 3-4
И кстати РВ у вас плохо управляется скорее всего из за того Stabilizer Pitch Gain задраный до 8
Инхо, эти параметры лучше по умолчанию делать. Мне 1 раз на фалконе потребовалось Stabilizer Pitch Gain править в меньшую сторону. Не хотел набирать высоту. Уменьшил до 3 - заработало.
Limit задаёт ограничение максимальной реации. А саму реакцию надо увеличивать следующим параметром Gain.
Так, если он мало отклоняет… Че-то запутался 😦
Попробуйте убавить Stabilizer Turn Gain до 3-4
И кстати РВ у вас плохо управляется скорее всего из за того Stabilizer Pitch Gain задраный до 8
Инхо, эти параметры лучше по умолчанию делать. Мне 1 раз на фалконе потребовалось Stabilizer Pitch Gain править в меньшую сторону. Не хотел набирать высоту. Уменьшил до 3 - заработало.
Так стоп!
вот в мануале написанно, что:
Stabilizer Pitch Gain (5): Данный пункт позволяет контролировать уровень угла крена для стабилизации. Если Ваш планер ”колбасит” по этой оси,
но не сваливает, то может помочь уменьшение шага крена.
Stabilizer Roll Gain (5): Данный пункт позволяет контролировать уровень тангажа для стабилизации. Если Ваш планер ”колбасит” по этой оси, но
не сваливает, то может помочь уменьшение шага тангажа.
если верить написанному, то у меня все верно: Тангаж ослаблен до 4, а крен зажат до 8. Хотя, меня сильно смутило, что “Пич” и “ролл”, какбэ, “перепутаны”. У АП, например, все наоборот: “ролл” - за крен, “Пич” - за тангаж.
Неужели ошибка в инструкции??
Так, если он мало отклоняет… Че-то запутался
Сначала усиливается параметром Gain и если он вышел больше чем Limit то ограничивается. Это для того чтобы при развороте в 180 градусов он не делал “бочку” 😃
Гм…интересно 😃 Хотя, мне казалось, что в настройках гардиана максимальный угол задается… Там для АП стоит 35 градусов. Хотя, на практике, он мой самуль на все 60 разворачивал. ну ладно, хотя бы так… а то вчера вообще хрен знает куда летел =(
Гм…интересно Хотя, мне казалось, что в настройках гардиана максимальный угол задается… Там для АП стоит 35 градусов. Хотя, на практике, он мой самуль на все 60 разворачивал. ну ладно, хотя бы так… а то вчера вообще хрен знает куда летел =(
Только Limit и Gain значения не в градусах. А просто в условных единицах, определяющих коэффициенты.
Неужели ошибка в инструкции??
Я настраивал еще до того как интрукцию перевели. И понял что уменьшение этих параметров увеличивает угол. Но у меня с фалконом это сработало, с другими самолетами не пробовал, небыло необходимости.
Гм… Ну ладно, попробую поменять значения, авось и получится 😃
Заранее извиняюсь, если вопрос глупый…
Подскажите пожалуйста, можно ли датчики Eagle Tree использовать без OSD.
Идея такая: поставить датчик скорости и высоты на борт, а показания с них выводить на дисплеи/цифровые экраны (типа как на самих датчиках, только чтобы не по одной цифре показывал, а сразу три, чтобы в реальном времени видеть параметр), прикреплённые на приборку в кокпите.
Идея не совсем стандартная, но хотелось бы сделать так в рамках определённого проекта.
Если можно это реализовать, то как?
Заранее спасибо за помощь.
Заранее извиняюсь, если вопрос глупый…
Подскажите пожалуйста, можно ли датчики Eagle Tree использовать без OSD.
Идея такая: поставить датчик скорости и высоты на борт, а показания с них выводить на дисплеи/цифровые экраны (типа как на самих датчиках, только чтобы не по одной цифре показывал, а сразу три, чтобы в реальном времени видеть параметр), прикреплённые на приборку в кокпите.
Идея не совсем стандартная, но хотелось бы сделать так в рамках определённого проекта.
Если можно это реализовать, то как?
Заранее спасибо за помощь.
Думаю с такой идеей Вам прямо на ветку про Ардупилот, там открытий код, мавлинк, где можно все данные считать и делать с ними что угодно.
протоколы обмена с датчиками билл открыл, так что можно и к Вашему определенному проекту подключить датчики от Eagle Tree, если есть подобная необходимость …
Вот сделал видео с теми непонятками АП:
www.youtube.com/watch?v=S9AEn1i81uU
Можно было в некоторых случаях подождать по-дольше и посмотреть, что будет. Но, из-за КоШаРа, что творился тогда в эфире - решил не рисковать.
А причиной этого КоШмАрА увы… Обещали в ЧЕВВАКУШ (челябинеский военный аэродром, находится от точки старта 20 км севернее; сейчас там полк Су-24М) поставить новую систему слежения за ЛА. По-ходу, включили ее 😦
Очень много импульсных помех. Как и по видео, так и по РУ. По РУ (433Мгц), в 200м проседало до 30 иглопопугаев 😦 А через 1сек все норм: И видео чистое, и РССИ 100%. Потом, через несколько секунд опять… По-видео вообще жуть 😦 Пробовал менять каналы - еще хуже становилось. Жаль, очень жаль, что патч-антенну забыл тогда…
Эдик пройди визард заново должно помочь.
Эдик пройди визард заново должно помочь.
Эх, с тех времен, когда перешел с КоПилота на гардиан - совсем забыл про такую особенность Иглов 😃 Тогда, чуть-ли не перед каждым вылетом его проходил.
Ок! Спасибо за наводочку. Странно только, с чего бы это игл так начал капризничать? Наверное из-за того, что начал активно крутить ПИДы? 😃
Кстати, что посоветуете сделать с пИДами перед визардом? Вернуть их в первоначальное состояние (до последних изменений), или поставить все по-умолчанию?
Кстати, что посоветуете сделать с пИДами перед визардом? Вернуть их в первоначальное состояние (до последних изменений), или поставить все по-умолчанию?
Пиды на визард не влияют. А по хорошему лучьше все по умолчанию чтобы не бороться с возможными ошибками в настройках.
Кстати, что посоветуете сделать с пИДами перед визардом?
ставь те на которых летал. у меня похожая хня была, прошел визард заново и все стало гуд.
Дано: самолет где гвардиану отдан РН.
При режиме РТН самолет ведет себя как рыба т.е. машет хвостом вправо/влево. Возможно слегка проскакивает курс на базу, поправляет в другую сторону, опять проскакивает и так по кругу (хотя я могу ошибаться и причина в другом).
Если отдать гвардиану элероны - точно так-же ведет себя по крену: правый крен, левый крен, правый крен и т.д.
Подскажите пожалуйста - какой параметр крутить чтобы исправить эту проблему?