Далеко и высоко. Тактика и практика

Сергей, я так понимаю я не доходчиво написал?
Повторю ещё раз - “Хватит флудить! Пишите в личку”
Парни хорош, давайте по теме…
Сергей, я так понимаю я не доходчиво написал?
Повторю ещё раз - “Хватит флудить! Пишите в личку”
Вы вообще не туда написали. Даже не в тот раздел. А обижаетесь, что флуд развели 😃 не надо было его начинать:)
Зы. Молодой еще… Это я в плане, что еще не было, кхм, “проблем” там… Менты, полет над дорогой…
Ага, Саш привет 😃 Все, тоже закончил флудить…
Андрей, не обращай внимания, я например никакого оффтопа в посте 4009 не вижу, просто здесь такое отношение к новичкам не редкость.
Готовиш самик к дальняку, хеликсы мотаеш - это всё по теме.
А то что камеру не поставил - это недоработка, хорошие кадры пропали.
Что вы на человека взъелись? Это один из шагов для проверки дальнобойности аппарата, перед тем как напичкать его электроникой, и отпустить его в
свободныйполет. Это тактика.
+1. Ого, нифига себе тут на пацана наехали. Если бы на меня в его возрасте так дядьки наезжали, то я бы не то что слово в ответ сказать, вообще бы с моделизма убежал. А Андрей молодец, в ответ еще пишет. Только вежливости побольше бы тебе Андрей и сдержанности(для твоего возраста это полезно). А остальным - ну написал он не в ту тему, бывает, но жестковато для его возраста вами сообщения написаны, ИМХО!
Я периодически запускаю разные штуки в стратосферу. Это бывают фотоаппараты, видеокамеры, научные приборы или экспериментальные материалы. И, как правило, место приземления всего этого добра оказывается где-то в глухом лесу или непроходимом болоте. Вот и приходится потом долго пробираться по буреломам, отбиваясь от полчищ комаров, чтобы забрать камеры или результаты эксперимента. В одном из таких походов, когда я шёл по ночному зимнему лесу по колено в снегу, мне очень захотелось сделать так, чтобы из стратосферы нагрузка возвращалась к нам сама. И для начала я решил вернуть оттуда FPV управляемый самолёт.
В качестве платформы я взял Скайвокер Х8. Поставил на него 1.2 Ггц 1.5 Вт видеопередатчик с квадрифилярной антенной, размещённой на конце одного крыла, курсовую камеру с сервой наклона, ГоПрошку, лрску на 433 мгц с V-антенной на конце второго крыла, автопилот с ОСД - Шторм, дополнительный самодельный логгер, пишущий высоту, координаты, скорость, температуру и пару поисковых маяков: GSM и спутниковый. В качестве питания использовалась 4s батарея 5.8 Ач. Для выгребания против ветра поставил мотор T-Motor FCR 3542-840 kv со складным винтом 13x6.5. На земле стояла спиральная антенна на приём и ещё пара тестовых приёмников с патчем и квадрифиляром.
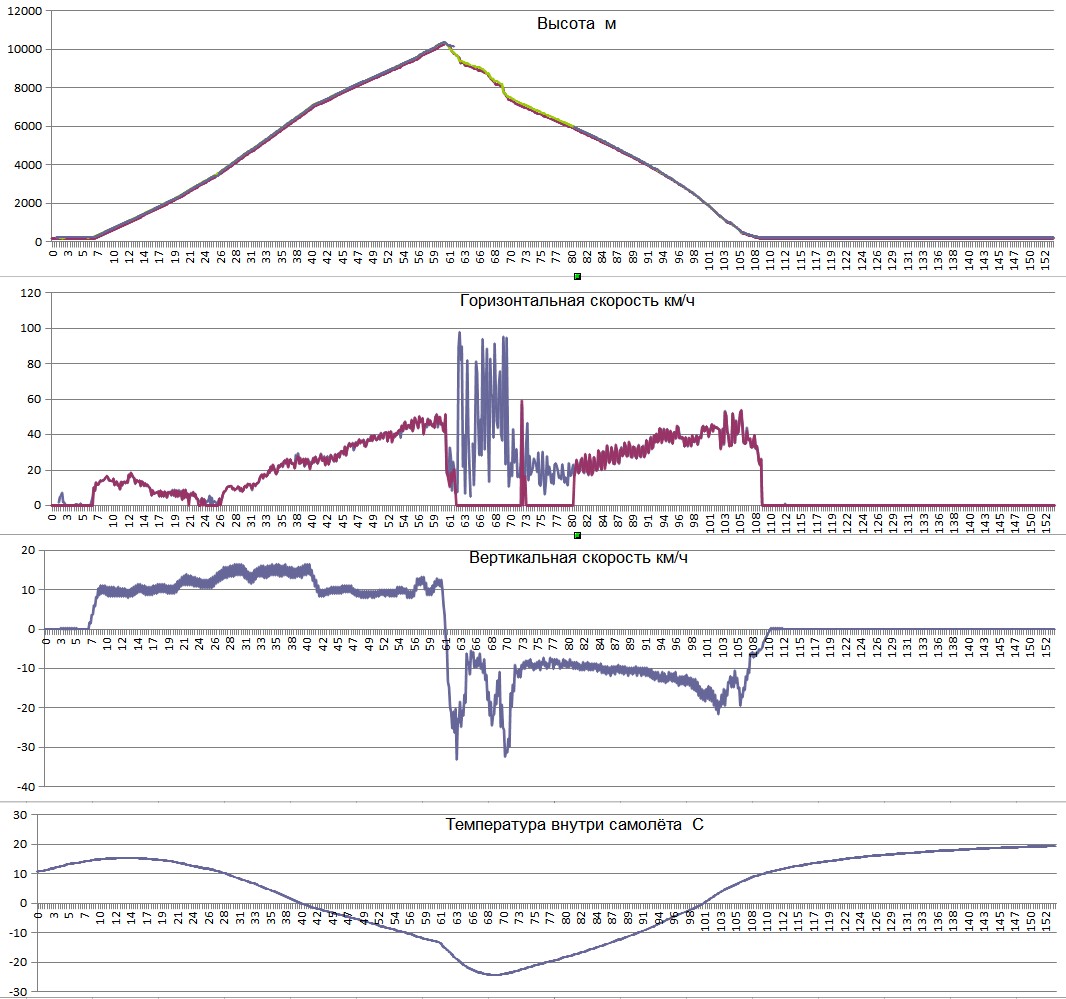
И вот провёл первый тестовый полёт. Самолёт был прикреплен к стратосферному зонду. Зонд накачан и запущен. День был облачным, и довольно долго пришлось смотреть бегущие цифры телеметрии на совершенно белом экране. Мы были очень рады, когда в кадре появились проблески голубого неба, лучи солнца и перина облаков, но уже внизу. Потихоньку мы добрались до высоты 10 км, при этом удаление было уже около 30 км. Тут уже начала пропадать видео картинка. Но лететь по ней казалось ещё можно. По крайней мере, линия горизонта была видна, а телеметрия читалась. Я включил режим отцепки и начал ждать самого интересного… Но во время отцепки, судя по всему, фал зацепился за антенну видеопередатчика, и её наклонило самым невыгодным образом. Дыра в её диаграмме направленности расположилась по направлению вперёд и вниз, то есть ровно туда, где находились мы. Соответственно, в тот момент, когда самолёт направлялся домой, видео пропадало совсем. С постоянно пропадающим видео было сложно понять, что с ним происходит, но по ощущениям его реакция на стики была малопредсказуемой. В редкие мгновения появления картинки было заметно, что самолёт пытается стабилизироваться, но что-то ему мешало. Возможно, сервоприводы элеронов замёрзли, хотя почти вся смазка из них была удалена. Температура за бортом была порядка -50 градусов. При этом высота плавно падала, а расстояние до самолёта постоянно увеличивалось. Видимо, в первую очередь виноват был ветер. На этой высоте он был около 100 км/ч. Опустившись на километр, самолёт отдалился от нас уже более чем на 40 км. Видео практически полностью пропало. Я включил режим RTH, отложил пульт и начал готовиться к работе с поисковыми маяками, прикидывая ориентировочное место приземления километрах в ста от места запуска.
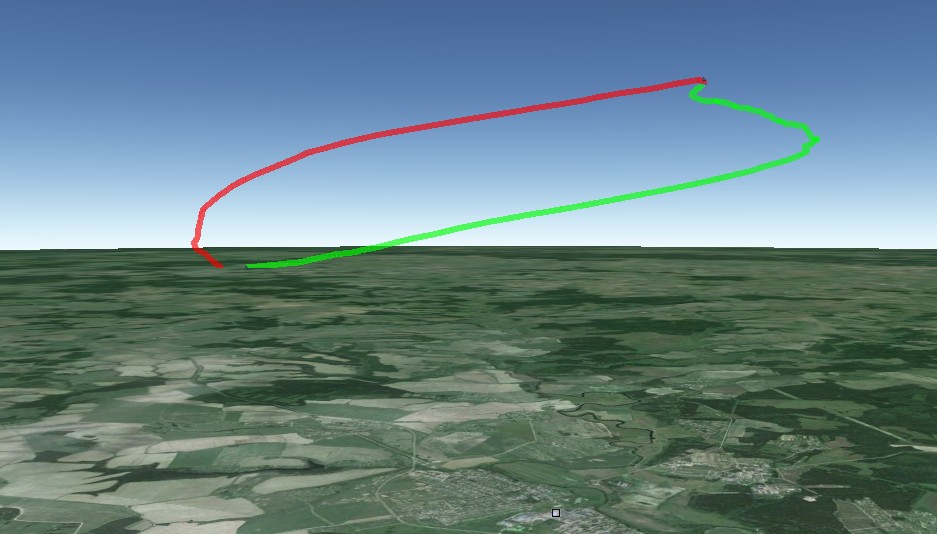
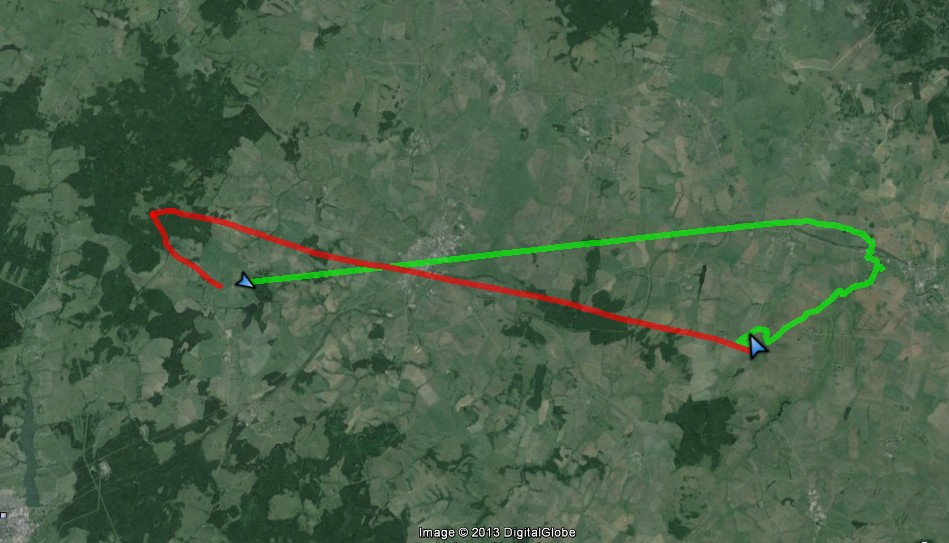
Но через несколько минут на экране вдруг появился видео сигнал. Покрутив антенну и найдя наилучшее направление, мы заметили, что самолёт довольно уверенно и стабильно снижается и держит курс ровно на дом. Высота была порядка 7 км, а дальность около 35 км, и она стабильно уменьшалась. Горизонтальную скорость автопилот держал порядка 60 км/ч, теряя высоту примерно по 3-4 м/с. Мои попытки управлять самолётом вручную удавались явно хуже, чем это делал автопилот. На изменение тяги двигателя самолёт не реагировал. Как выяснилось позже, к этому моменту Х8 был просто планером 😃 То, что делал автопилот, казалось очень близким к идеальной траектории. Поэтому нам оставалось только наблюдать за уменьшающимися цифрами расстояния и высоты. На картинке мы видели лишь плотную облачность где-то далеко внизу и живописный закат, который оказался ровно в направлении точки “дома”. В течении получаса мы спорили, дотянет самолёт до нас или нет. В это время самолёт вошёл в облака и я взял в руки пульт, готовясь к попыткам помочь ему дотянуть до дома. А долететь ему оставалось всего около 5 км. К моменту выхода из облаков солнце уже зашло да и обе камеры то ли замёрзли, то ли запотели. В общем, даже линию горизонта определить было сложно. Единственное, что мы видели, это градиент из тёмного снизу в светлый сверху. Высота была около 500 м, но до дома надо было протянуть ещё 3 км. Отслеживая высоту, скорость и крен по приборам, я пытался максимально продлить полёт вручную, а опустившись до нуля по высоте, пытался в слепую посадить его. Мой Шторм (автопилот) настроен после приземления показывать максимальную достигнутую высоту и координаты своего положения. Так вот то, что самолёт сел, я понял лишь когда высотомер выдал на экран 9999 м (ещё при подъёме мы узнали, что это максимум, который он может показать). Не дотянул он до нас всего 1 км.
Когда мы дошли до координат, выдаваемых автопилотом, мы поняли, что наше крыло совершило очень мягкую посадку, но кроме загнутой антенны обнаружилась ещё одна проблема… Вместо двигателя и пропеллера зияла дыра. Позже на записи с бортовой камеры я увидел момент отрыва двигателя (6.05). Судя по видео, самолёт свалился в пике и разогнался до такой скорости, когда винт начал работать в качестве парашюта. А 30% газа, включающиеся при FS, видимо, не дали винту сложиться. Так, судя по всему, путь с 9-километровой высоты и 40-километрового удаления Х8 проделал без двигателя с очень передней центровкой.
Самое обидное, что из двух наземных писалок одна записала только подъём до 4 км, после чего выключилась, а вторая писала весь полёт, но в самом конце зависла и не сохранила файл. Соответственно, у меня есть лишь видео всего полёта с ГоПро без телеметрии и лишь с облаками в кадре и логи всего полёта в текстовом виде, из которых я сделал несколько графиков.




Теперь я собираюсь подправить самолёт и наземку и буду готовиться миновать рубеж в 20 км высоты.
P.S. На подобные полёты я получаю разрешение в нескольких инстанциях, включая зональный и главный центр управления воздушным движением, который устанавливает временный режим до высоты 30 км с ограничением полётов для других Л.А.
Многие решения явно сырые из-за недостатка бюджета и времени. И если вы вдруг готовы чем-то помочь, то буду рад.
Знаю, что написал слишком много, наверняка не в ту тему, что дурак, что наверняка убил кого-то упавшим с высоты 10км двигателем и вообще всё делал не правильно. Но пишу сюда, т.к. именно в этой ветке должны быть люди, которые знают ответы на мои вопросы, хотя слабо верю, что те, кто знают, ответят 😃
-
Почему самолёт так нервно себя вёл пока был двигатель и тяга при учёте изначально передней центровки и почему он так стабильно и хорошо полетел без двигателя, несмотря на ещё сильнее сместившуюся вперёд центровку? Возможно, что сервы, находящиеся снаружи, даже при учёте убранной из них смазки, при -60С работали слишком медленно при условии большой скорости под тягой?
-
Какой двигатель вы посоветуете поставить на Х8 для целей такого полёта?
-
Какой автопилот лучше использовать для таких полётов? Когда-то давно Smaltim дали мне полный набор своего автопилота, но настроить мне его не удалось… Подозреваю, что что-то в нём поломалось, но Тим на мои письма с вопросами так и не ответил 😦 Шторм на котором я летал в этот раз, в общем, неплохо себя показал, но сомневаюсь, что он будет адекватно себя вести на высотах больше 15км из-за ограничений GPS и установленного на нём слабенького барометра.
-
Какие антенны лучше использовать для подобных полётов в видео тракте и управлении?
Круто! Рад за первую реальную попытку из темы “Полет в стартосферу”.
Какой автопилот лучше использовать для таких полётов? Когда-то давно Smaltim дали мне полный набор своего автопилота, но настроить мне его не удалось…
Даже если в SmallTime есть 10 км ограничение по высоте (не уверен, но может быть) , его легко снять. Это может сделать Тимофей, или я, если речь идет о “старом” АП c IMU. Починить и отладить его тоже не проблемма.
18 км ограничение GPS обойти сложнее, но вроде есть модули , работающие до 30 км.
18 км ограничение GPS обойти сложнее, но вроде есть модули , работающие до 30 км.
А не вариант- спиралью спуститься до высоты включения gps (стандартное поведение автопилота), а уже затем возврат по координатам.
В общем- может высотный gps не так уж и необходим?
Видео не смотрел. ИМХО мотор оторвало потому что винт не смог раскрыться. Был ли момент, когда двигатель выключался полностью? Стоял ли ограничитель складывания винта? Я это к тому, что есть такие ступицы складных винтов, на которых лопасть может сложиться так, что не сможет принять рабочего положения при включении мотора.
Ну или причиной отрыва ВМГ был некачественный монтаж последней.
В общем- может высотный gps не так уж и необходим?
Дык по бародатчику высота будет грубой. А интересены точные цифры. 😃
Шторм на котором я летал в этот раз, в общем, неплохо себя показал,
Если учесть те температуры в которых он нормально функционировал, думаю очень неплохо. Подогрева от ходовой как понимаю не было и герметичность фюзеляжа не была идеальной.
ИМХО мотор оторвало потому что винт не смог раскрыться.
Судя по звуку отрыв произошёл на рабочих оборотах. Думаю не учли низкие температуры и как следствие хрупкость материалов при монтаже.
А что за LRS у вас?
Какой автопилот лучше использовать для таких полётов?
ИМХО Ардупилот. Причем оригинальный, не клоны. Хотя и клоны пойдут, просто на них иногда встречаются врожденные болячки. Лимит высоты там только от ГПСа. И функций куча, в том числе нужные для подобных полетов режимы работы стабилизации.
Думаю не учли низкие температуры и как следствие хрупкость материалов при монтаже.
Возможно, при наборе высоты, произошло обледенение моторной установки , из-за чего нарушилась балансировка. Если бы выдержало крепление, то мотор при работе прогрелся бы и дальше пошло все нормально. Поэтому советую укрепить мотораму: внутри фюзеляжа сделайте ответную пластину из фанеры и скрепите ее с моторамой винтами. Я так сделал у себя, когда при немного жестком ударе об землю на посадке отвалиласть моторама вместе с мотором. Образец на фото:
А нужен ли такой большой мотор и винт? Для горизонтального полета этому аппарату достаточно 100-120Вт. с двойным запасом ну 300Вт и винт соответственно меньше и складной точно лишний.
Без мотора чуть чуть не долетели. Еслиб не проблеммы с видео то и мотор не нужен.
P.S. На подобные полёты я получаю разрешение в нескольких инстанциях, включая зональный и главный центр управления воздушным движением, который устанавливает временный режим до высоты 30 км с ограничением полётов для других Л.А.
Как вам это удается? То есть заходящие например на расположенный в 30км аэропорт самолеты должны следовать другим маршрутом, пока я собрался полетать в субботу?
Или вы это делаете не как частное лицо, а в рамках какой-то работы?
18 км ограничение GPS обойти сложнее, но вроде есть модули , работающие до 30 км.
У меня такие есть.
А не вариант- спиралью спуститься до высоты включения gps (стандартное поведение автопилота), а уже затем возврат по координатам.
В общем- может высотный gps не так уж и необходим?
А какие автопилоты такое делают? Но там наверху ветра более 100 км/ч Лучше сразу пытаться лететь куда надо.
Видео не смотрел. ИМХО мотор оторвало потому что винт не смог раскрыться. Был ли момент, когда двигатель выключался полностью? Стоял ли ограничитель складывания винта? Я это к тому, что есть такие ступицы складных винтов, на которых лопасть может сложиться так, что не сможет принять рабочего положения при включении мотора.
Ну или причиной отрыва ВМГ был некачественный монтаж последней.
Ваш комментарий не читал, но подозреваю, что вы в нём наверняка ошибаетесь 😃 В видео всё слышно и понятно что проблема явно не в неправильном раскладывании. Монтаж то я конечно усилю, но не оторвёт ли пенопластовую опу если причина в чём-то другом?
Если учесть те температуры в которых он нормально функционировал, думаю очень неплохо. Подогрева от ходовой как понимаю не было и герметичность фюзеляжа не была идеальной.
Герметичности не было вообще. Недавно моё оборудование летевшее на стратостате на высоте 40км перегрелось… Так что я и не знаю от чего больше защищаться.
Судя по звуку отрыв произошёл на рабочих оборотах. Думаю не учли низкие температуры и как следствие хрупкость материалов при монтаже.
Вырвало шурупы из фанеры. Фанера не сильно изменяет свойства от температуры.
А что за LRS у вас?
Производитель этой ЛРСки просил ничего о ней не писать т.к. не хочет лишней рекламы 😃
Производитель этой ЛРСки просил ничего о ней не писать т.к. не хочет лишней рекламы
ну тогда скажите отечественный производитель или нет ?
А нужен ли такой большой мотор и винт? Для горизонтального полета этому аппарату достаточно 100-120Вт. с двойным запасом ну 300Вт и винт соответственно меньше и складной точно лишний.
Без мотора чуть чуть не долетели. Еслиб не проблеммы с видео то и мотор не нужен.
Вот тут я и прошу совета какой мотор и винт выбрать? Но кроме полётов сверху вниз он всё-таки должен уметь летать и снизу вверх для отлаживания всего на земле.
Т.к. в режиме планирования он себя показал не плохо, то большую часть маршрута можно планировать… а для этого складной винт, по моему, лучший вариант.
При подъёме шар летит по ветру, а значит возвращаться самолёту всегда придётся против ветра… Думаю, что мотор всё-таки нужен.
Как вам это удается? То есть заходящие например на расположенный в 30км аэропорт самолеты должны следовать другим маршрутом, пока я собрался полетать в субботу?
Или вы это делаете не как частное лицо, а в рамках какой-то работы?
Делаю как частное лицо. Дату и время запуска согласовываю с ближайшими аэродромами и выбираю время, когда у них нет полётов. Правда приходится тащить свою задницу вместе со всем оборудованием километров за 150 от Москвы, туда, где нет больших аэродромов и выбирать точку запуска на отдалении от воздушных трасс.
Вы писали, что поставили винт 13х6.5 ?
Как мне кажется, нужен шаг побольше, а диаметр поменьше. В калькуляторе посмотрите какую макс скорость потока он обеспечивает. Она не должна быть ниже скорости планера (воздушной скорости). А у вас окозалась нааборот… На истину не расчитываю, но мне так кажется.
Т.к. в режиме планирования он себя показал не плохо, то большую часть маршрута можно планировать… а для этого складной винт, по моему, лучший вариант.
Чтобы не сомневаться в раскрытии лопастей, можно для такого полета поставить не складной винт и настроить тормоз на регуле.
Судя по видео, самолёт свалился в пике и разогнался до такой скорости, когда винт начал работать в качестве парашюта. А 30% газа, включающиеся при FS, видимо, не дали винту сложиться.
в место шторма надо ставить игл. у него двиг включается на настроенной высоте. Выставить к примеру 2км высоты и пусть до нее без движка планирует…
(