обдумываю самодельный CNC

принципиально вот такой:

Основная задача - уложится в минимальную стоимость.
Соответственно если знаете где купить дешевле, и как сделать оптимальнее - будет здорово.
+++++++++++++
Электрика и электроника:
------------------------
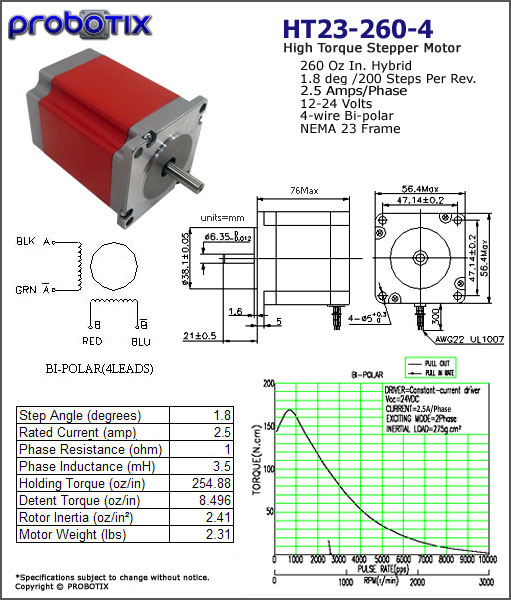
Шаговые двигатели:

Красный или синий. Чем они отличаются - я не понял (что значить bi-polar или uni-polar)
или такой
-----------------------
Motor Driver Board:
Как я понимаю - это - плата для управления двигателями с компьютера (для чего нужен соответствующий софт).
Варианты:
www.xylotex.com/3axBoard.htm
или три таких
cgi.ebay.com/3-Axis-CNC-Stepper-Motor-Driver-mill-…или такой - 100$
----------------------
Brakeout board. Что это такое? это - нужно?
----------------------
Блок питания
Нужен какой-то особый блок питания или любой, который выдаёт столько-то вольт и столько-то ампер подойдёт?
Двигатели + Driver board ~ 220$ + доставка.
+++++++++++++
Механика:
-----------------------
Предположительно треюуется следующее:
- precision shaft (ровный стальной циллиндв) (6 штук)
- Linear plain bearings (циллиндрики, которые по ним ездят) (12 штук)
- Lead Screw c Delrin Nut (большой болт без шляпки и гайка) (3 штуки)
- наверное нужен какой-то переходник, чтобы lead screw присоединить к шаговому двигателю.
-----------------------
Shaft:
на www.mcmaster.com средняя стоимость требующихся shaft-ов - 10$ - total - 60$
Linear plain bearings
там-же стоимость предположительно нужного “подшипника” - 11$ total - 132
Lead Screw with Delrin Nut
тут 15$ + 15$ + 26$ total 56
Всего на механику - 248$ + доставка.
Итого 468$ + около 100$ за доставку.

Это - очень приблизительный концепт (извините за расцветку). небольшая хитрость бирюзовый стол будет вылезать за пределы “станка”, чтобы обеспечить 50 см по одной оси, использую короткий и тонкий shaft (чтобы дешевле было (есть и другие преимущества))
Это - очень приблизительный концепт (извините за расцветку). небольшая хитрость бирюзовый стол будет вылезать за пределы “станка”, чтобы обеспечить 50 см по одной оси, использую короткий и тонкий shaft (чтобы дешевле было (есть и другие преимущества))
А преимущество ли это? Кому как…
у меня стол тоже вылазит - довольно удобно.
www.modularcnc.com/3_-_axis_machines
Не совсем понимаю, как у них получается так дёшево.
дак они жвроде пишут что все из МДФ сделано и двиджочки хиленкие
если все пересчитать дак по моему еще дешвеле выйет на месте все собрать
Brakeout board. Что это такое? это - нужно?
это проста платка комутации
Ага понятно - тоесть плата, которая необходима в случае использования “мелких плат” отдельно для каждого движка. при использовании “единой платы” - не нужно.
Плату управления - я купил за 100$ вместе с доставкой. Вот эта:

Теперь - с блоком питания - непонятки:
Мне подойдёт любой источник энергии с определённым вольтажём и выходной млщностью, или нужен какойто особый. В общем есть ли что-то особенное в требуемом блоке питания?
Следующее, закупку чего я планирую - шаговые двигатели. присматриваюсь к этому:
Надеюсь он совместим с платой.
вот такой движёк:
50$ - стоимость доставки итого получится ~ 170$ за двигатели. + 100$ - плата управления + предположим 40$ - источник питания+доставка итого 310 - вся электроника. дешевле кита на 50$ (стоимость доставки кита).
Возникла у меня мысль (три):
- Почему бы не использовать дюймовые никелированные трубы из метизов вместо precision shafts
- Почему бы не использовать sleeve plain bearings вместо linear plain bearings (в 10-ть раз дешевле).
- возможно имеет смысл даже использовать штанги с нарезкой и болты вместо винтовой передачи обычно используемой в станках.
И дюймовые трубы расширяют возможности по размерам станка.
замечательный ресурс для всяких железок
Я ещё рассматриваю Этот шаговый двигатель не уверен только, что он подходит для купленного контроллера
Возникла у меня мысль (три):
- Почему бы не использовать дюймовые никелированные трубы из метизов вместо precision shafts
- Почему бы не использовать sleeve plain bearings вместо linear plain bearings (в 10-ть раз дешевле).
- возможно имеет смысл даже использовать штанги с нарезкой и болты вместо винтовой передачи обычно используемой в станках.
И дюймовые трубы расширяют возможности по размерам станка.
Дешева рибка - погана юшка. Не гонись за дешевизной, как бы потом не пришлось переделывать…
Я уже где-то хвастался своим
rcopen.com/files/470373c79970730077f29382
так вот заменить круглые шлифованные направляющие на трубы, пусть даже ой какие хорошие, не позволил. Лучше гдето чуть переплатить, но потом быть уверенным в железявости конструкции.
Я уже где-то хвастался своим
rcopen.com/files/470373c79970730077f29382
так вот заменить круглые шлифованные направляющие на трубы, пусть даже ой какие хорошие, не позволил. Лучше гдето чуть переплатить, но потом быть уверенным в железявости конструкции.
Железявость конструкции - ПЯТЬ БАЛЛОВ 😛
Ну вот, движки купил - красные в robotix.
Теперь нужно купить блок питания.
Мне нужен 24-х вольтовый на 4.3 ампера или больше
Но что же значит Switching power supply? типа переключается между 110 и 220. или что там switched?
Я уже где-то хвастался своим
rcopen.com/files/470373c79970730077f29382
так вот заменить круглые шлифованные направляющие на трубы, пусть даже ой какие хорошие, не позволил. Лучше гдето чуть переплатить, но потом быть уверенным в железявости конструкции.
Использую направляющие (каретки) от старых печатных машинок. Очень крепкие.
Описание конструкции здесь: www.cqham.ru/hlp42_11.htm
Удачи!
Ну печатных машинок у меня нет, а вот использование монтажных уголков и не только как на сайте ссылку на котором я нашёл на вашем сайте - весьма разумно как мне кажется:
www.mntc.ru/projects/kulibin/
Не в качестве линейных направляющих, а в качестве базы конструкции - чтобы без дерева обойтись.
Всётаки я пока думаю делать линейные направляющие из никенированых стальных дюймовых труб и пластиковых sleeve bearings.
Пока детальки едут надо думать дальше.
Этап первый - разработа подвижного стола.
Вариант 1:

Первое что бросается в глаза - волт нудно ставить блиде к движку.
второе - можно использовать трубы короче и три подшипника а не четыре.
Крепление подшипников хомутами - мне не нравится, но лучше пока ничего не придумал.
Вариант 2:

Стало на 2-е детали маньше и на 10$ дешевле. и легче.